 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotic Untangling of Herbs and Salads with Parallel Grippers
Aug 09, 2022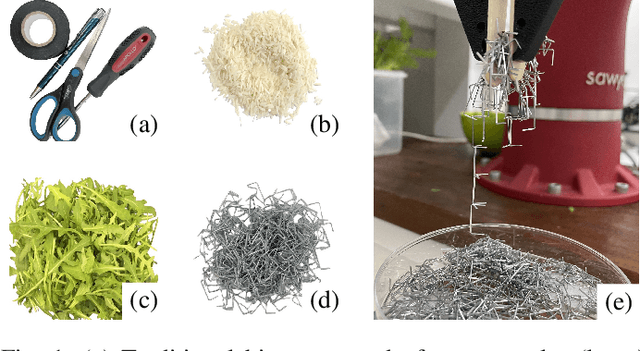
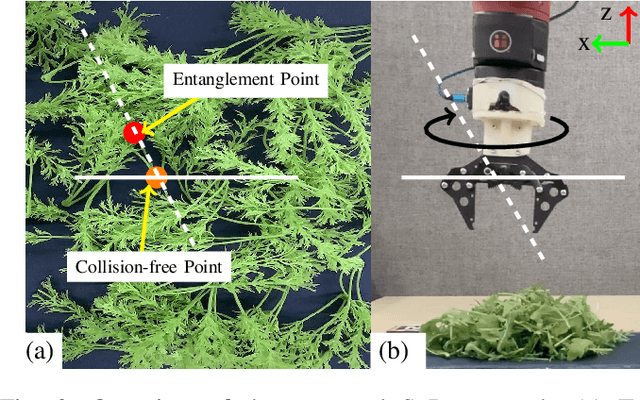
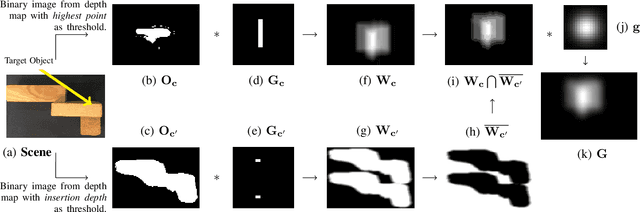
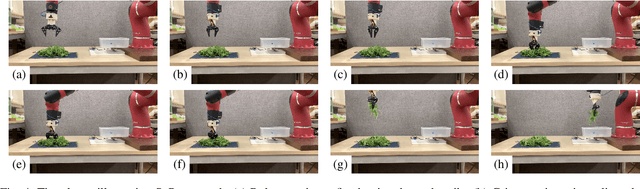
The picking of one or more objects from an unsorted pile continues to be non-trivial for robotic systems. This is especially so when the pile consists of a granular material (GM) containing individual items that tangle with one another, causing more to be picked out than desired. One of the key features of such tangle-prone GMs is the presence of protrusions extending out from the main body of items in the pile. This work characterises the role the latter play in causing mechanical entanglement and their impact on picking consistency. It reports experiments in which picking GMs with different protrusion lengths (PLs) results in up to 76% increase in picked mass variance, suggesting PL to be an informative feature in the design of picking strategies. Moreover, to counter this effect, it proposes a new spread-and-pick (SnP) approach that significantly reduces tangling, making picking more consistent. Compared to prior approaches that seek to pick from a tangle-free point in the pile, the proposed method results in a decrease in picking error (PE) of up to 51%, and shows good generalisation to previously unseen GMs.
Exploiting Ergonomic Priors in Human-to-Robot Task Transfer
Mar 01, 2020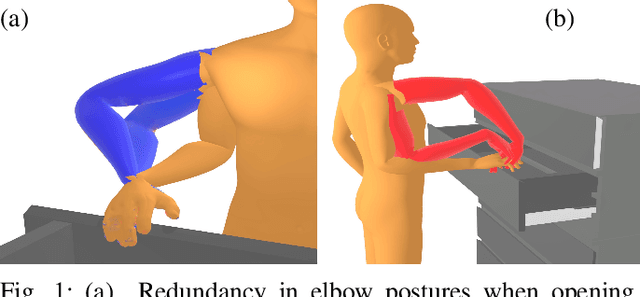
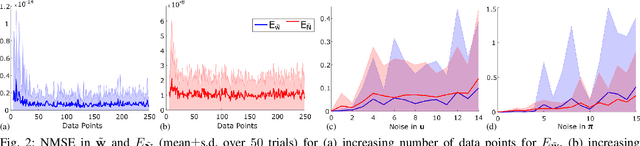
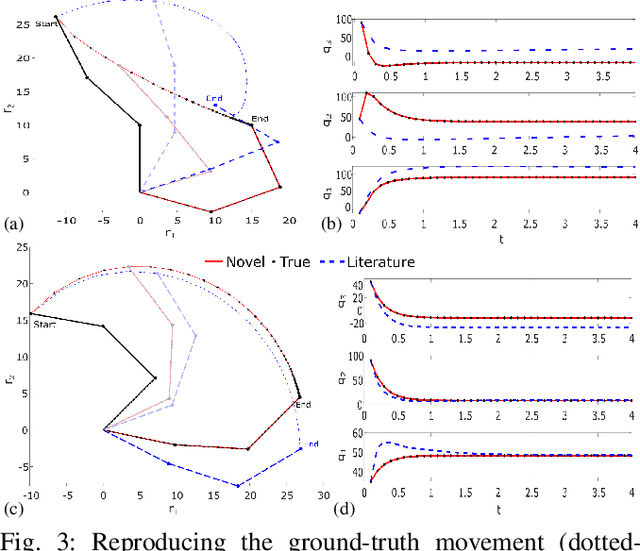
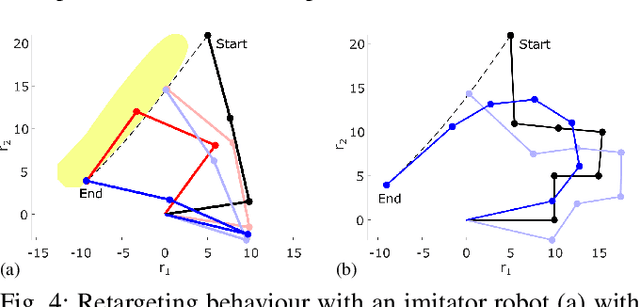
In recent years, there has been a booming shift in the development of versatile, autonomous robots by introducing means to intuitively teach robots task-oriented behaviour by demonstration. In this paper, a method based on programming by demonstration is proposed to learn null space policies from constrained motion data. The main advantage to using this is generalisation of a task by retargeting a systems redundancy as well as the capability to fully replace an entire system with another of varying link number and lengths while still accurately repeating a task subject to the same constraints. The effectiveness of the method has been demonstrated in a 3-link simulation and a real world experiment using a human subject as the demonstrator and is verified through task reproduction on a 7DoF physical robot. In simulation, the method works accurately with even as little as five data points producing errors less than 10^-14. The approach is shown to outperform the current state-of-the-art approach in a simulated 3DoF robot manipulator control problem where motions are reproduced using learnt constraints. Retargeting of a systems null space component is also demonstrated in a task where controlling how redundancy is resolved allows for obstacle avoidance. Finally, the approach is verified in a real world experiment using demonstrations from a human subject where the learnt task space trajectory is transferred onto a 7DoF physical robot of a different embodiment.