 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotic Untangling of Herbs and Salads with Parallel Grippers
Paper and Code
Aug 09, 2022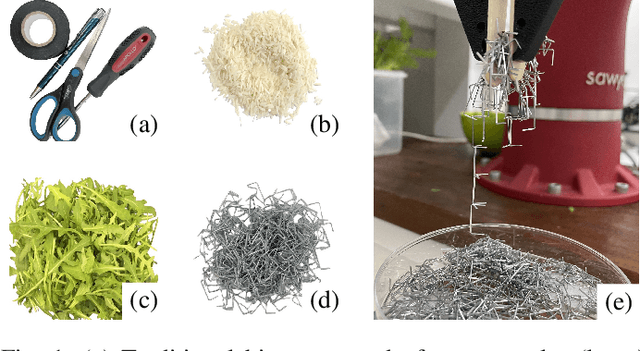
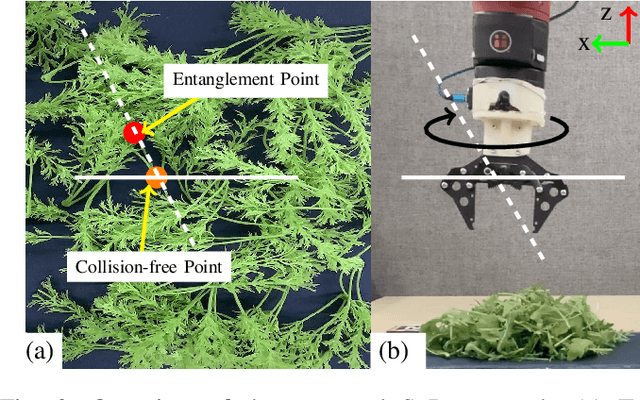
The picking of one or more objects from an unsorted pile continues to be non-trivial for robotic systems. This is especially so when the pile consists of a granular material (GM) containing individual items that tangle with one another, causing more to be picked out than desired. One of the key features of such tangle-prone GMs is the presence of protrusions extending out from the main body of items in the pile. This work characterises the role the latter play in causing mechanical entanglement and their impact on picking consistency. It reports experiments in which picking GMs with different protrusion lengths (PLs) results in up to 76% increase in picked mass variance, suggesting PL to be an informative feature in the design of picking strategies. Moreover, to counter this effect, it proposes a new spread-and-pick (SnP) approach that significantly reduces tangling, making picking more consistent. Compared to prior approaches that seek to pick from a tangle-free point in the pile, the proposed method results in a decrease in picking error (PE) of up to 51%, and shows good generalisation to previously unseen GMs.