 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMicro-Structures Graph-Based Point Cloud Registration for Balancing Efficiency and Accuracy
Oct 29, 2024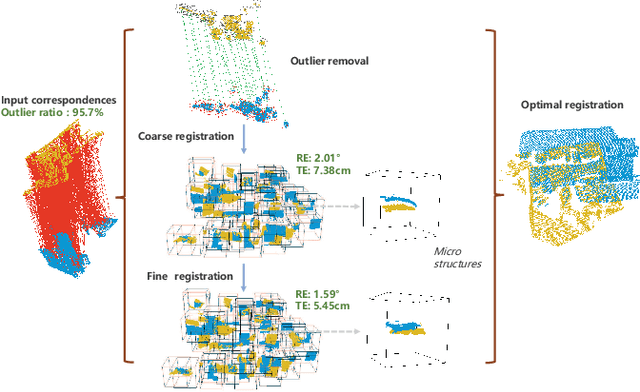
Point Cloud Registration (PCR) is a fundamental and significant issue in photogrammetry and remote sensing, aiming to seek the optimal rigid transformation between sets of points. Achieving efficient and precise PCR poses a considerable challenge. We propose a novel micro-structures graph-based global point cloud registration method. The overall method is comprised of two stages. 1) Coarse registration (CR): We develop a graph incorporating micro-structures, employing an efficient graph-based hierarchical strategy to remove outliers for obtaining the maximal consensus set. We propose a robust GNC-Welsch estimator for optimization derived from a robust estimator to the outlier process in the Lie algebra space, achieving fast and robust alignment. 2) Fine registration (FR): To refine local alignment further, we use the octree approach to adaptive search plane features in the micro-structures. By minimizing the distance from the point-to-plane, we can obtain a more precise local alignment, and the process will also be addressed effectively by being treated as a planar adjustment algorithm combined with Anderson accelerated optimization (PA-AA). After extensive experiments on real data, our proposed method performs well on the 3DMatch and ETH datasets compared to the most advanced methods, achieving higher accuracy metrics and reducing the time cost by at least one-third.