 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComputational Methods for Probabilistic Inference of Sector Congestion in Air Traffic Management
Sep 16, 2013



This article addresses the issue of computing the expected cost functions from a probabilistic model of the air traffic flow and capacity management. The Clenshaw-Curtis quadrature is compared to Monte-Carlo algorithms defined specifically for this problem. By tailoring the algorithms to this model, we reduce the computational burden in order to simulate real instances. The study shows that the Monte-Carlo algorithm is more sensible to the amount of uncertainty in the system, but has the advantage to return a result with the associated accuracy on demand. The performances for both approaches are comparable for the computation of the expected cost of delay and the expected cost of congestion. Finally, this study shows some evidences that the simulation of the proposed probabilistic model is tractable for realistic instances.
Multiobjective Tactical Planning under Uncertainty for Air Traffic Flow and Capacity Management
Sep 16, 2013



We investigate a method to deal with congestion of sectors and delays in the tactical phase of air traffic flow and capacity management. It relies on temporal objectives given for every point of the flight plans and shared among the controllers in order to create a collaborative environment. This would enhance the transition from the network view of the flow management to the local view of air traffic control. Uncertainty is modeled at the trajectory level with temporal information on the boundary points of the crossed sectors and then, we infer the probabilistic occupancy count. Therefore, we can model the accuracy of the trajectory prediction in the optimization process in order to fix some safety margins. On the one hand, more accurate is our prediction; more efficient will be the proposed solutions, because of the tighter safety margins. On the other hand, when uncertainty is not negligible, the proposed solutions will be more robust to disruptions. Furthermore, a multiobjective algorithm is used to find the tradeoff between the delays and congestion, which are antagonist in airspace with high traffic density. The flow management position can choose manually, or automatically with a preference-based algorithm, the adequate solution. This method is tested against two instances, one with 10 flights and 5 sectors and one with 300 flights and 16 sectors.
Strategic Planning in Air Traffic Control as a Multi-objective Stochastic Optimization Problem
Sep 16, 2013



With the objective of handling the airspace sector congestion subject to continuously growing air traffic, we suggest to create a collaborative working plan during the strategic phase of air traffic control. The plan obtained via a new decision support tool presented in this article consists in a schedule for controllers, which specifies time of overflight on the different waypoints of the flight plans. In order to do it, we believe that the decision-support tool shall model directly the uncertainty at a trajectory level in order to propagate the uncertainty to the sector level. Then, the probability of congestion for any sector in the airspace can be computed. Since air traffic regulations and sector congestion are antagonist, we designed and implemented a multi-objective optimization algorithm for determining the best trade-off between these two criteria. The solution comes up as a set of alternatives for the multi-sector planner where the severity of the congestion cost is adjustable. In this paper, the Non-dominated Sorting Genetic Algorithm (NSGA-II) was used to solve an artificial benchmark problem involving 24 aircraft and 11 sectors, and is able to provide a good approximation of the Pareto front.
Quality Measures of Parameter Tuning for Aggregated Multi-Objective Temporal Planning
May 10, 2013
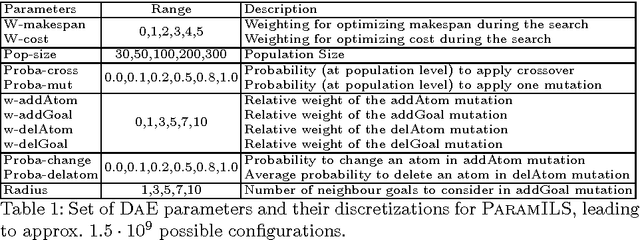


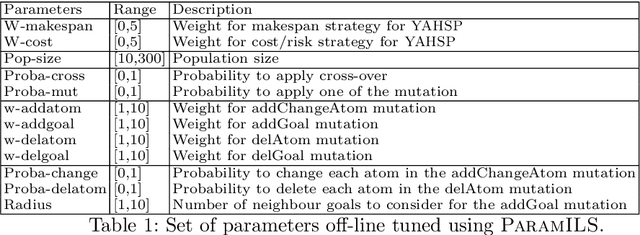
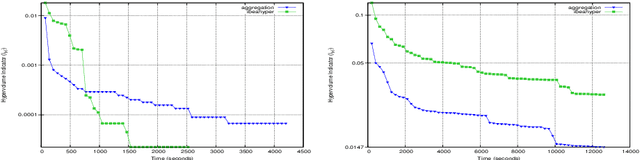
Parameter tuning is recognized today as a crucial ingredient when tackling an optimization problem. Several meta-optimization methods have been proposed to find the best parameter set for a given optimization algorithm and (set of) problem instances. When the objective of the optimization is some scalar quality of the solution given by the target algorithm, this quality is also used as the basis for the quality of parameter sets. But in the case of multi-objective optimization by aggregation, the set of solutions is given by several single-objective runs with different weights on the objectives, and it turns out that the hypervolume of the final population of each single-objective run might be a better indicator of the global performance of the aggregation method than the best fitness in its population. This paper discusses this issue on a case study in multi-objective temporal planning using the evolutionary planner DaE-YAHSP and the meta-optimizer ParamILS. The results clearly show how ParamILS makes a difference between both approaches, and demonstrate that indeed, in this context, using the hypervolume indicator as ParamILS target is the best choice. Other issues pertaining to parameter tuning in the proposed context are also discussed.
* arXiv admin note: substantial text overlap with arXiv:1305.1169
Multi-Objective AI Planning: Comparing Aggregation and Pareto Approaches
May 06, 2013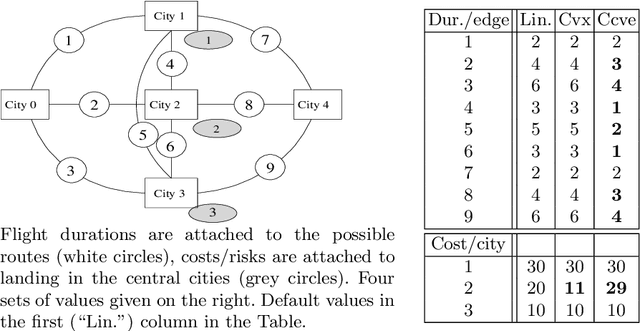
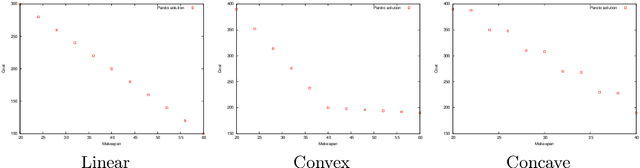
Most real-world Planning problems are multi-objective, trying to minimize both the makespan of the solution plan, and some cost of the actions involved in the plan. But most, if not all existing approaches are based on single-objective planners, and use an aggregation of the objectives to remain in the single-objective context. Divide and Evolve (DaE) is an evolutionary planner that won the temporal deterministic satisficing track at the last International Planning Competitions (IPC). Like all Evolutionary Algorithms (EA), it can easily be turned into a Pareto-based Multi-Objective EA. It is however important to validate the resulting algorithm by comparing it with the aggregation approach: this is the goal of this paper. The comparative experiments on a recently proposed benchmark set that are reported here demonstrate the usefulness of going Pareto-based in AI Planning.
Multi-Objective AI Planning: Evaluating DAE-YAHSP on a Tunable Benchmark
Dec 20, 2012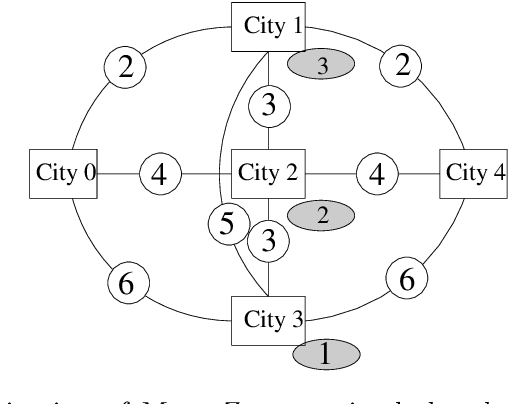
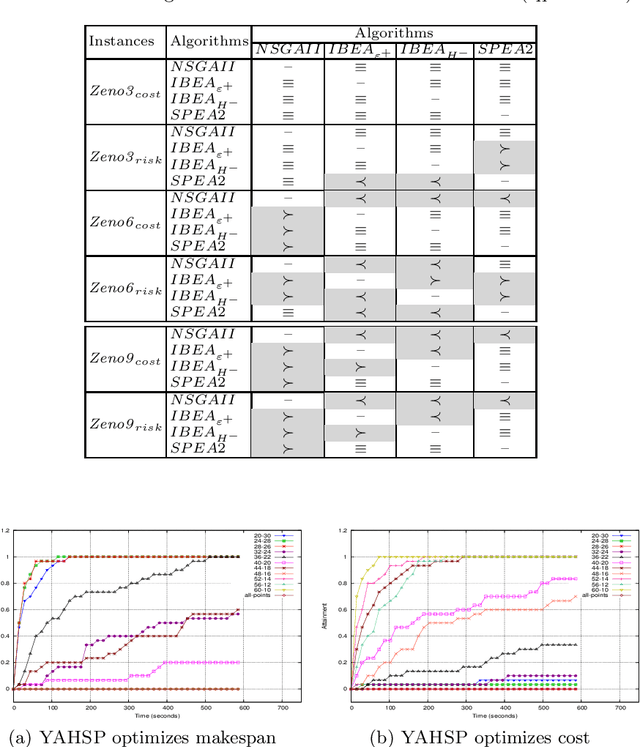

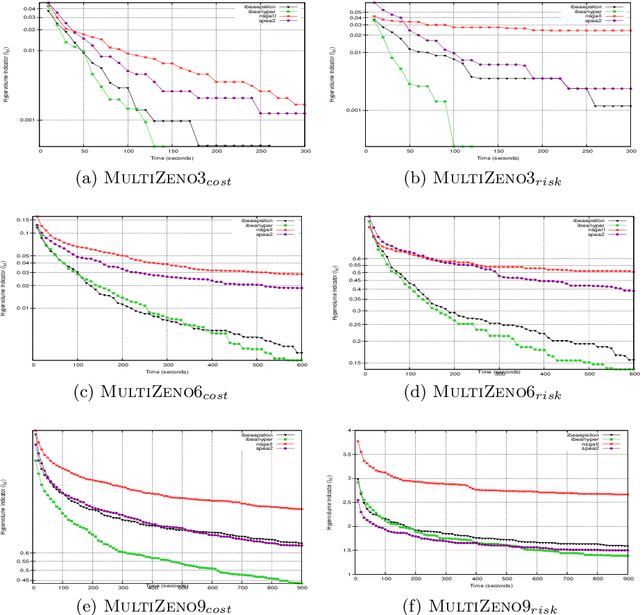
All standard AI planners to-date can only handle a single objective, and the only way for them to take into account multiple objectives is by aggregation of the objectives. Furthermore, and in deep contrast with the single objective case, there exists no benchmark problems on which to test the algorithms for multi-objective planning. Divide and Evolve (DAE) is an evolutionary planner that won the (single-objective) deterministic temporal satisficing track in the last International Planning Competition. Even though it uses intensively the classical (and hence single-objective) planner YAHSP, it is possible to turn DAE-YAHSP into a multi-objective evolutionary planner. A tunable benchmark suite for multi-objective planning is first proposed, and the performances of several variants of multi-objective DAE-YAHSP are compared on different instances of this benchmark, hopefully paving the road to further multi-objective competitions in AI planning.
Online Learning for Ground Trajectory Prediction
Dec 17, 2012



This paper presents a model based on an hybrid system to numerically simulate the climbing phase of an aircraft. This model is then used within a trajectory prediction tool. Finally, the Covariance Matrix Adaptation Evolution Strategy (CMA-ES) optimization algorithm is used to tune five selected parameters, and thus improve the accuracy of the model. Incorporated within a trajectory prediction tool, this model can be used to derive the order of magnitude of the prediction error over time, and thus the domain of validity of the trajectory prediction. A first validation experiment of the proposed model is based on the errors along time for a one-time trajectory prediction at the take off of the flight with respect to the default values of the theoretical BADA model. This experiment, assuming complete information, also shows the limit of the model. A second experiment part presents an on-line trajectory prediction, in which the prediction is continuously updated based on the current aircraft position. This approach raises several issues, for which improvements of the basic model are proposed, and the resulting trajectory prediction tool shows statistically significantly more accurate results than those of the default model.
Increasing Air Traffic: What is the Problem?
Dec 17, 2012


Nowadays, huge efforts are made to modernize the air traffic management systems to cope with uncertainty, complexity and sub-optimality. An answer is to enhance the information sharing between the stakeholders. This paper introduces a framework that bridges the gap between air traffic management and air traffic control on the one hand, and bridges the gap between the ground, the approach and the en-route centers on the other hand. An original system is presented, that has three essential components: the trajectory models, the optimization process, and the monitoring process. The uncertainty of the trajectory is modeled with a Bayesian Network, where the nodes are associated to two types of random variables: the time of overflight on metering points of the airspace, and the traveling time of the routes linking these points. The resulting Bayesian Network covers the complete airspace, and Monte- Carlo simulations are done to estimate the probabilities of sector congestion and delays. On top of this trajectory model, an optimization process minimizes these probabilities by tuning the parameters of the Bayesian trajectory model related to overflight times on metering points. The last component is the monitoring process, that continuously updates the situation of the airspace, modifying the trajectories uncertainties according to actual positions of aircraft. After each update, a new optimal set of overflight times is computed, and can be communicated to the controllers as clearances for the aircraft pilots. The paper presents a formal specification of this global optimization problem, whose underlying rationale was derived with the help of air traffic controllers at Thales Air Systems.
Divide-and-Evolve: a New Memetic Scheme for Domain-Independent Temporal Planning
Jan 09, 2006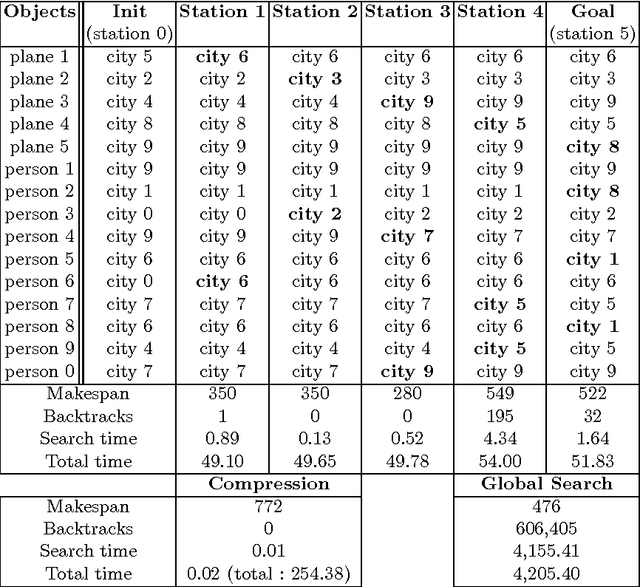
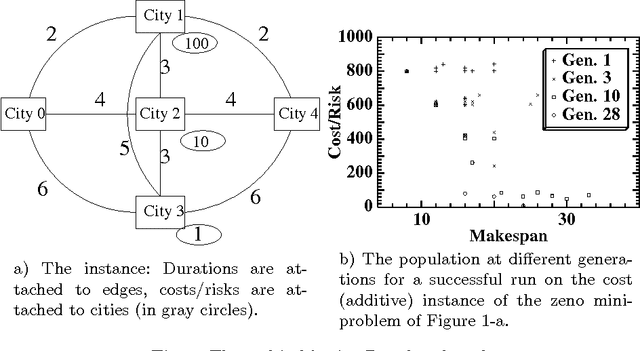
An original approach, termed Divide-and-Evolve is proposed to hybridize Evolutionary Algorithms (EAs) with Operational Research (OR) methods in the domain of Temporal Planning Problems (TPPs). Whereas standard Memetic Algorithms use local search methods to improve the evolutionary solutions, and thus fail when the local method stops working on the complete problem, the Divide-and-Evolve approach splits the problem at hand into several, hopefully easier, sub-problems, and can thus solve globally problems that are intractable when directly fed into deterministic OR algorithms. But the most prominent advantage of the Divide-and-Evolve approach is that it immediately opens up an avenue for multi-objective optimization, even though the OR method that is used is single-objective. Proof of concept approach on the standard (single-objective) Zeno transportation benchmark is given, and a small original multi-objective benchmark is proposed in the same Zeno framework to assess the multi-objective capabilities of the proposed methodology, a breakthrough in Temporal Planning.