 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRacing Multi-Objective Selection Probabilities
Jun 19, 2014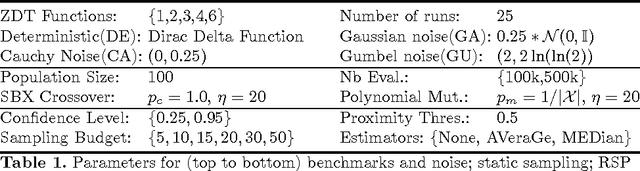


In the context of Noisy Multi-Objective Optimization, dealing with uncertainties requires the decision maker to define some preferences about how to handle them, through some statistics (e.g., mean, median) to be used to evaluate the qualities of the solutions, and define the corresponding Pareto set. Approximating these statistics requires repeated samplings of the population, drastically increasing the overall computational cost. To tackle this issue, this paper proposes to directly estimate the probability of each individual to be selected, using some Hoeffding races to dynamically assign the estimation budget during the selection step. The proposed racing approach is validated against static budget approaches with NSGA-II on noisy versions of the ZDT benchmark functions.
Computational Methods for Probabilistic Inference of Sector Congestion in Air Traffic Management
Sep 16, 2013



This article addresses the issue of computing the expected cost functions from a probabilistic model of the air traffic flow and capacity management. The Clenshaw-Curtis quadrature is compared to Monte-Carlo algorithms defined specifically for this problem. By tailoring the algorithms to this model, we reduce the computational burden in order to simulate real instances. The study shows that the Monte-Carlo algorithm is more sensible to the amount of uncertainty in the system, but has the advantage to return a result with the associated accuracy on demand. The performances for both approaches are comparable for the computation of the expected cost of delay and the expected cost of congestion. Finally, this study shows some evidences that the simulation of the proposed probabilistic model is tractable for realistic instances.
Multiobjective Tactical Planning under Uncertainty for Air Traffic Flow and Capacity Management
Sep 16, 2013



We investigate a method to deal with congestion of sectors and delays in the tactical phase of air traffic flow and capacity management. It relies on temporal objectives given for every point of the flight plans and shared among the controllers in order to create a collaborative environment. This would enhance the transition from the network view of the flow management to the local view of air traffic control. Uncertainty is modeled at the trajectory level with temporal information on the boundary points of the crossed sectors and then, we infer the probabilistic occupancy count. Therefore, we can model the accuracy of the trajectory prediction in the optimization process in order to fix some safety margins. On the one hand, more accurate is our prediction; more efficient will be the proposed solutions, because of the tighter safety margins. On the other hand, when uncertainty is not negligible, the proposed solutions will be more robust to disruptions. Furthermore, a multiobjective algorithm is used to find the tradeoff between the delays and congestion, which are antagonist in airspace with high traffic density. The flow management position can choose manually, or automatically with a preference-based algorithm, the adequate solution. This method is tested against two instances, one with 10 flights and 5 sectors and one with 300 flights and 16 sectors.
Strategic Planning in Air Traffic Control as a Multi-objective Stochastic Optimization Problem
Sep 16, 2013



With the objective of handling the airspace sector congestion subject to continuously growing air traffic, we suggest to create a collaborative working plan during the strategic phase of air traffic control. The plan obtained via a new decision support tool presented in this article consists in a schedule for controllers, which specifies time of overflight on the different waypoints of the flight plans. In order to do it, we believe that the decision-support tool shall model directly the uncertainty at a trajectory level in order to propagate the uncertainty to the sector level. Then, the probability of congestion for any sector in the airspace can be computed. Since air traffic regulations and sector congestion are antagonist, we designed and implemented a multi-objective optimization algorithm for determining the best trade-off between these two criteria. The solution comes up as a set of alternatives for the multi-sector planner where the severity of the congestion cost is adjustable. In this paper, the Non-dominated Sorting Genetic Algorithm (NSGA-II) was used to solve an artificial benchmark problem involving 24 aircraft and 11 sectors, and is able to provide a good approximation of the Pareto front.
Online Learning for Ground Trajectory Prediction
Dec 17, 2012



This paper presents a model based on an hybrid system to numerically simulate the climbing phase of an aircraft. This model is then used within a trajectory prediction tool. Finally, the Covariance Matrix Adaptation Evolution Strategy (CMA-ES) optimization algorithm is used to tune five selected parameters, and thus improve the accuracy of the model. Incorporated within a trajectory prediction tool, this model can be used to derive the order of magnitude of the prediction error over time, and thus the domain of validity of the trajectory prediction. A first validation experiment of the proposed model is based on the errors along time for a one-time trajectory prediction at the take off of the flight with respect to the default values of the theoretical BADA model. This experiment, assuming complete information, also shows the limit of the model. A second experiment part presents an on-line trajectory prediction, in which the prediction is continuously updated based on the current aircraft position. This approach raises several issues, for which improvements of the basic model are proposed, and the resulting trajectory prediction tool shows statistically significantly more accurate results than those of the default model.
Increasing Air Traffic: What is the Problem?
Dec 17, 2012


Nowadays, huge efforts are made to modernize the air traffic management systems to cope with uncertainty, complexity and sub-optimality. An answer is to enhance the information sharing between the stakeholders. This paper introduces a framework that bridges the gap between air traffic management and air traffic control on the one hand, and bridges the gap between the ground, the approach and the en-route centers on the other hand. An original system is presented, that has three essential components: the trajectory models, the optimization process, and the monitoring process. The uncertainty of the trajectory is modeled with a Bayesian Network, where the nodes are associated to two types of random variables: the time of overflight on metering points of the airspace, and the traveling time of the routes linking these points. The resulting Bayesian Network covers the complete airspace, and Monte- Carlo simulations are done to estimate the probabilities of sector congestion and delays. On top of this trajectory model, an optimization process minimizes these probabilities by tuning the parameters of the Bayesian trajectory model related to overflight times on metering points. The last component is the monitoring process, that continuously updates the situation of the airspace, modifying the trajectories uncertainties according to actual positions of aircraft. After each update, a new optimal set of overflight times is computed, and can be communicated to the controllers as clearances for the aircraft pilots. The paper presents a formal specification of this global optimization problem, whose underlying rationale was derived with the help of air traffic controllers at Thales Air Systems.