 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuality Measures of Parameter Tuning for Aggregated Multi-Objective Temporal Planning
May 10, 2013
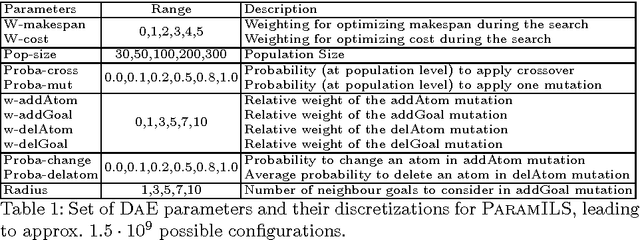


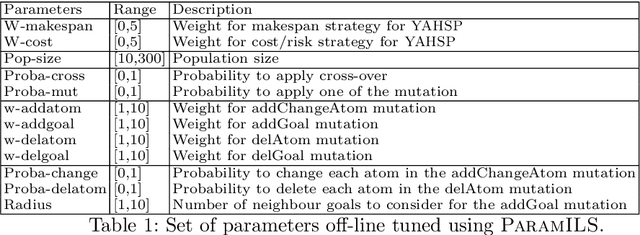
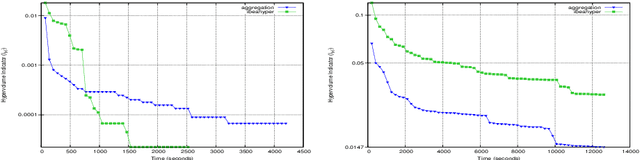
Parameter tuning is recognized today as a crucial ingredient when tackling an optimization problem. Several meta-optimization methods have been proposed to find the best parameter set for a given optimization algorithm and (set of) problem instances. When the objective of the optimization is some scalar quality of the solution given by the target algorithm, this quality is also used as the basis for the quality of parameter sets. But in the case of multi-objective optimization by aggregation, the set of solutions is given by several single-objective runs with different weights on the objectives, and it turns out that the hypervolume of the final population of each single-objective run might be a better indicator of the global performance of the aggregation method than the best fitness in its population. This paper discusses this issue on a case study in multi-objective temporal planning using the evolutionary planner DaE-YAHSP and the meta-optimizer ParamILS. The results clearly show how ParamILS makes a difference between both approaches, and demonstrate that indeed, in this context, using the hypervolume indicator as ParamILS target is the best choice. Other issues pertaining to parameter tuning in the proposed context are also discussed.
* arXiv admin note: substantial text overlap with arXiv:1305.1169
Multi-Objective AI Planning: Comparing Aggregation and Pareto Approaches
May 06, 2013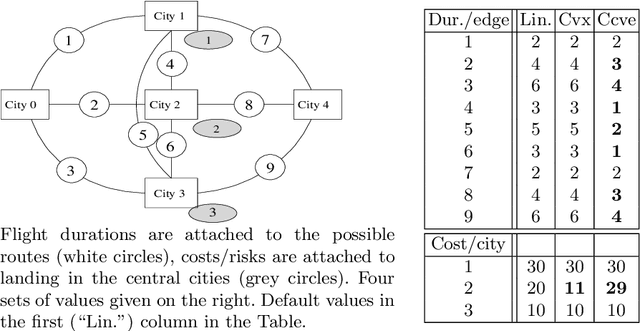
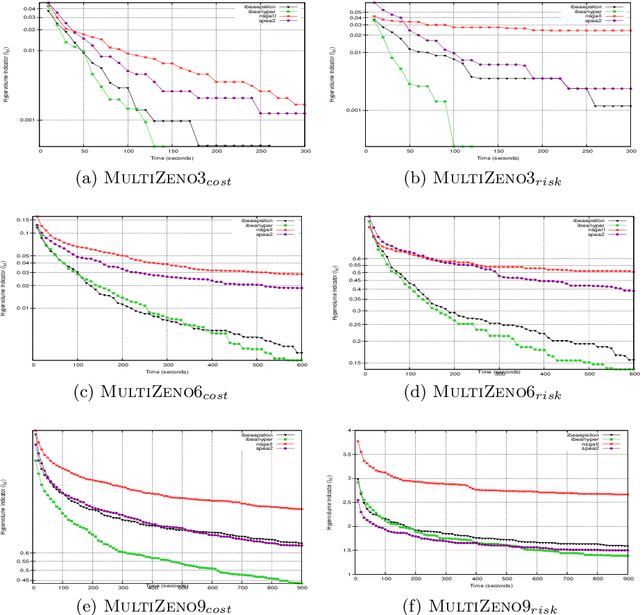
Most real-world Planning problems are multi-objective, trying to minimize both the makespan of the solution plan, and some cost of the actions involved in the plan. But most, if not all existing approaches are based on single-objective planners, and use an aggregation of the objectives to remain in the single-objective context. Divide and Evolve (DaE) is an evolutionary planner that won the temporal deterministic satisficing track at the last International Planning Competitions (IPC). Like all Evolutionary Algorithms (EA), it can easily be turned into a Pareto-based Multi-Objective EA. It is however important to validate the resulting algorithm by comparing it with the aggregation approach: this is the goal of this paper. The comparative experiments on a recently proposed benchmark set that are reported here demonstrate the usefulness of going Pareto-based in AI Planning.
Multi-Objective AI Planning: Evaluating DAE-YAHSP on a Tunable Benchmark
Dec 20, 2012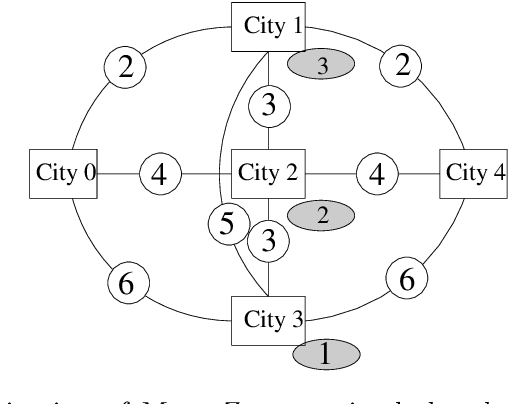
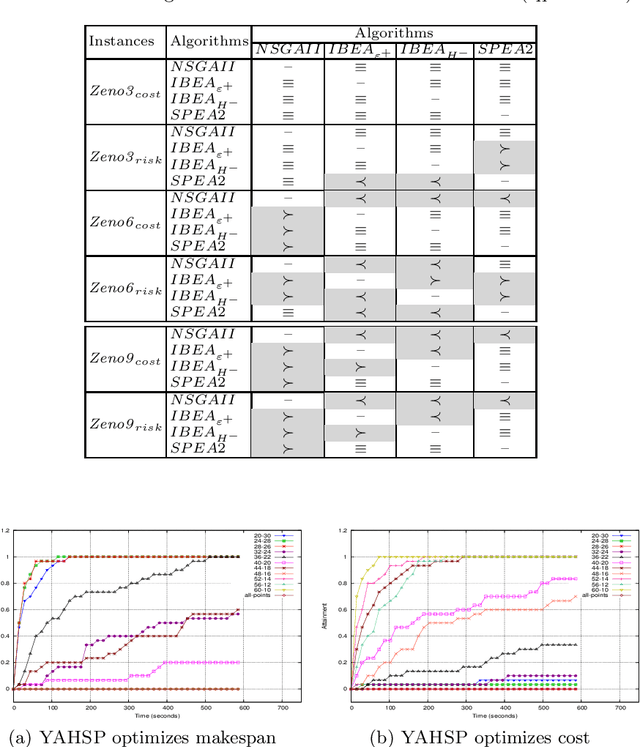

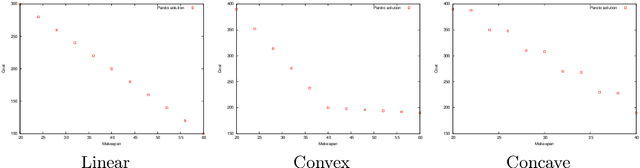
All standard AI planners to-date can only handle a single objective, and the only way for them to take into account multiple objectives is by aggregation of the objectives. Furthermore, and in deep contrast with the single objective case, there exists no benchmark problems on which to test the algorithms for multi-objective planning. Divide and Evolve (DAE) is an evolutionary planner that won the (single-objective) deterministic temporal satisficing track in the last International Planning Competition. Even though it uses intensively the classical (and hence single-objective) planner YAHSP, it is possible to turn DAE-YAHSP into a multi-objective evolutionary planner. A tunable benchmark suite for multi-objective planning is first proposed, and the performances of several variants of multi-objective DAE-YAHSP are compared on different instances of this benchmark, hopefully paving the road to further multi-objective competitions in AI planning.