 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Diagnostic of Road Pathway Visibility
Jan 21, 2016
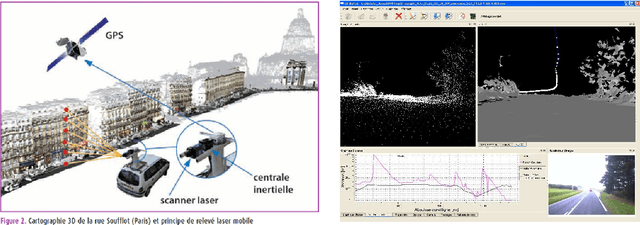
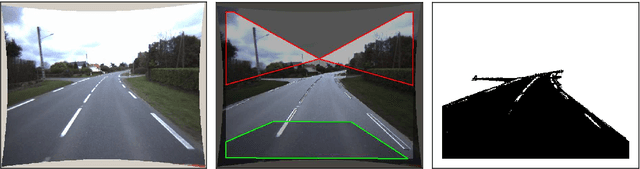
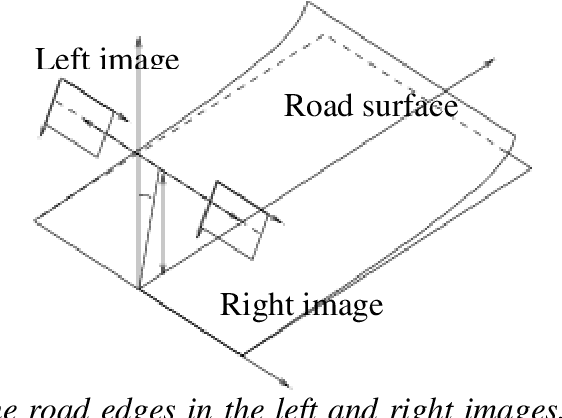
Visibility distance on the road pathway plays a significant role in road safety and in particular, has a clear impact on the choice of speed limits. Visibility distance is thus of importance for road engineers and authorities. While visibility distance criteria are routinely taken into account in road design, only a few systems exist for estimating it on existing road networks. Most existing systems comprise a target vehicle followed at a constant distance by an observer vehicle, which only allows to check if a given, fixed visibility distance is available. We propose two new approaches that allow estimating the maximum available visibility distance, involving only one vehicle and based on different sensor technologies, namely binocular stereovision and 3D range sensing (LIDAR). The first approach is based on the processing of two views taken by digital cameras onboard the diagnostic vehicle. The main stages of the process are: road segmentation, edge registration between the two views, road profile 3D reconstruction and finally, maximal road visibility distance estimation. The second approach involves the use of a Terrestrial LIDAR Mobile Mapping System. The triangulated 3D model of the road and its surroundings provided by the system is used to simulate targets at different distances, which allows estimating the maximum geometric visibility distance along the pathway. These approaches were developed in the context of the SARI-VIZIR PREDIT project. Both approaches are described, evaluated and compared. Their pros and cons with respect to vehicle following systems are also discussed.