 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeYOLinO: Generic Single Shot Polyline Detection in Real Time
Mar 26, 2021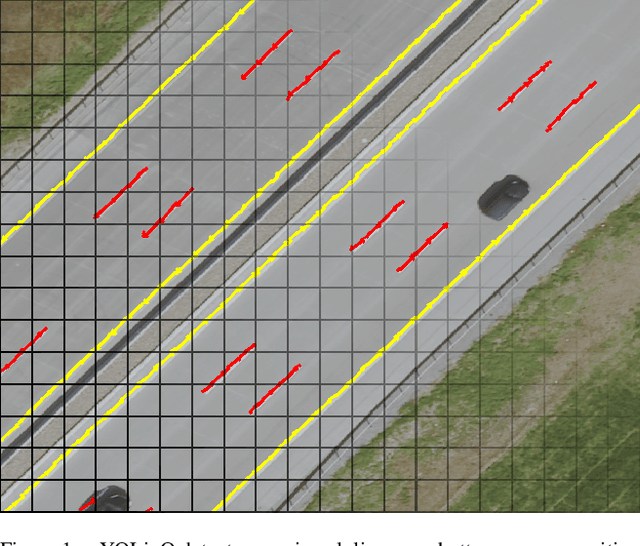
The detection of polylines in images is usually either bound to branchless polylines or formulated in a recurrent way, prohibiting their use in real-time systems. We propose an approach that transfers the idea of single shot object detection. Reformulating the problem of polyline detection as bottom-up composition of small line segments allows to detect bounded, dashed and continuous polylines with a single head. This has several major advantages over previous methods. Not only is the method at 187 fps more than suited for real-time applications with virtually any restriction on the shapes of the detected polylines. By predicting multiple line segments for each spatial cell, even branching or crossing polylines can be detected. We evaluate our approach on three different applications for road marking, lane border and center line detection. Hereby, we demonstrate the ability to generalize to different domains as well as both implicit and explicit polyline detection tasks.