 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAll Weather Perception: Joint Data Association, Tracking, and Classification for Autonomous Ground Vehicles
May 07, 2016
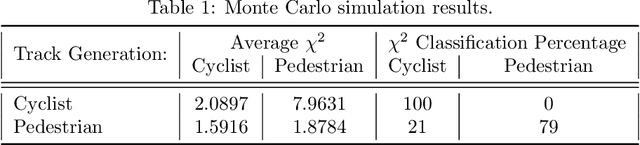
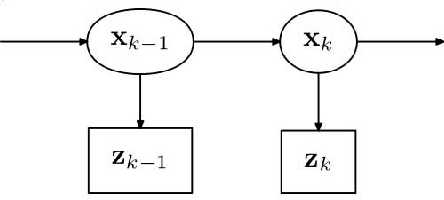
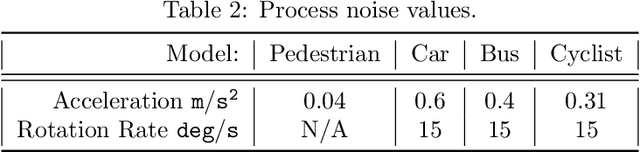
A novel probabilistic perception algorithm is presented as a real-time joint solution to data association, object tracking, and object classification for an autonomous ground vehicle in all-weather conditions. The presented algorithm extends a Rao-Blackwellized Particle Filter originally built with a particle filter for data association and a Kalman filter for multi-object tracking (Miller et al. 2011a) to now also include multiple model tracking for classification. Additionally a state-of-the-art vision detection algorithm that includes heading information for autonomous ground vehicle (AGV) applications was implemented. Cornell's AGV from the DARPA Urban Challenge was upgraded and used to experimentally examine if and how state-of-the-art vision algorithms can complement or replace lidar and radar sensors. Sensor and algorithm performance in adverse weather and lighting conditions is tested. Experimental evaluation demonstrates robust all-weather data association, tracking, and classification where camera, lidar, and radar sensors complement each other inside the joint probabilistic perception algorithm.
Self-Excitation: An Enabler for Online Thermal Estimation and Model Predictive Control of Buildings
Dec 27, 2015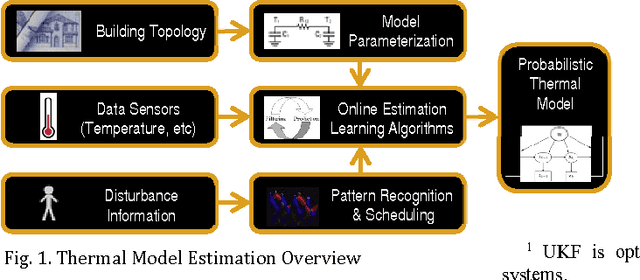


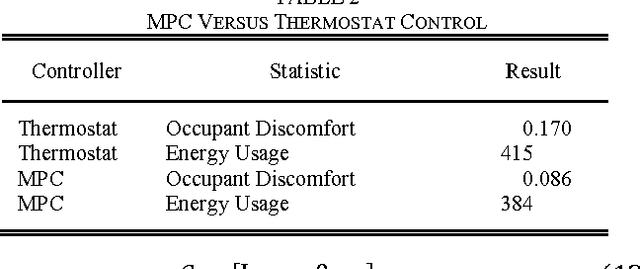
This paper investigates a method to improve buildings' thermal predictive control performance via online identification and excitation (active learning process) that minimally disrupts normal operations. In previous studies we have demonstrated scalable methods to acquire multi-zone thermal models of passive buildings using a gray-box approach that leverages building topology and measurement data. Here we extend the method to multi-zone actively controlled buildings and examine how to improve the thermal model estimation by using the controller to excite unknown portions of the building's dynamics. Comparing against a baseline thermostat controller, we demonstrate the utility of both the initially acquired and improved thermal models within a Model Predictive Control (MPC) framework, which anticipates weather uncertainty and time-varying temperature set-points. A simulation study demonstrates self-excitation improves model estimation, which corresponds to improved MPC energy savings and occupant comfort. By coupling building topology, estimation, and control routines into a single online framework, we have demonstrated the potential for low-cost scalable methods to actively learn and control buildings to ensure occupant comfort and minimize energy usage, all while using the existing building's HVAC sensors and hardware.
Online Model Estimation for Predictive Thermal Control of Buildings
Dec 27, 2015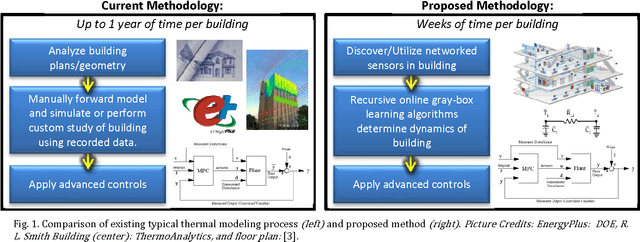
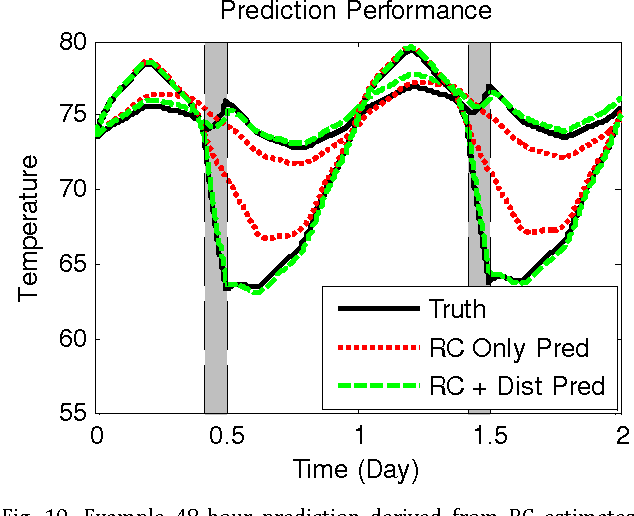

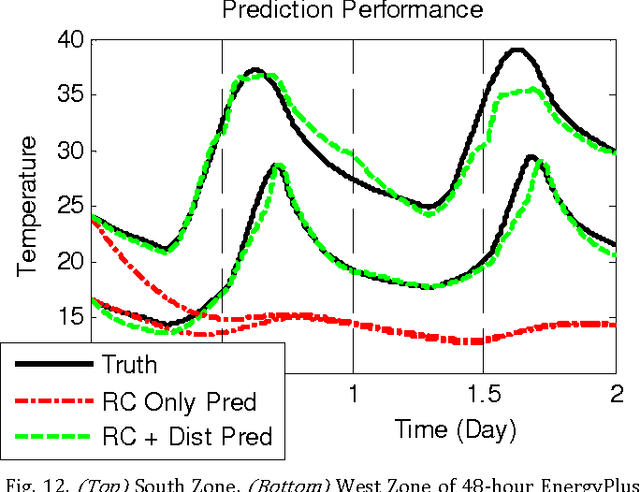
This study proposes a general, scalable method to learn control-oriented thermal models of buildings that could enable wide-scale deployment of cost-effective predictive controls. An Unscented Kalman Filter augmented for parameter and disturbance estimation is shown to accurately learn and predict a building's thermal response. Recent studies of heating, ventilating, and air conditioning (HVAC) systems have shown significant energy savings with advanced model predictive control (MPC). A scalable cost-effective method to readily acquire accurate, robust models of individual buildings' unique thermal envelopes has historically been elusive and hindered the widespread deployment of prediction-based control systems. Continuous commissioning and lifetime performance of these thermal models requires deployment of on-line data-driven system identification and parameter estimation routines. We propose a novel gray-box approach using an Unscented Kalman Filter based on a multi-zone thermal network and validate it with EnergyPlus simulation data. The filter quickly learns parameters of a thermal network during periods of known or constrained loads and then characterizes unknown loads in order to provide accurate 24+ hour energy predictions. This study extends our initial investigation by formalizing parameter and disturbance estimation routines and demonstrating results across a year-long study.