 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSymmetry Preservation in Swarms of Oblivious Robots with Limited Visibility
Sep 28, 2024In the general pattern formation (GPF) problem, a swarm of simple autonomous, disoriented robots must form a given pattern. The robots' simplicity imply a strong limitation: When the initial configuration is rotationally symmetric, only patterns with a similar symmetry can be formed [Yamashita, Suzyuki; TCS 2010]. The only known algorithm to form large patterns with limited visibility and without memory requires the robots to start in a near-gathering (a swarm of constant diameter) [Hahn et al.; SAND 2024]. However, not only do we not know any near-gathering algorithm guaranteed to preserve symmetry but most natural gathering strategies trivially increase symmetries [Castenow et al.; OPODIS 2022]. Thus, we study near-gathering without changing the swarm's rotational symmetry for disoriented, oblivious robots with limited visibility (the OBLOT-model, see [Flocchini et al.; 2019]). We introduce a technique based on the theory of dynamical systems to analyze how a given algorithm affects symmetry and provide sufficient conditions for symmetry preservation. Until now, it was unknown whether the considered OBLOT-model allows for any non-trivial algorithm that always preserves symmetry. Our first result shows that a variant of Go-to-the-Average always preserves symmetry but may sometimes lead to multiple, unconnected near-gathering clusters. Our second result is a symmetry-preserving near-gathering algorithm that works on swarms with a convex boundary (the outer boundary of the unit disc graph) and without holes (circles of diameter 1 inside the boundary without any robots).
Forming Large Patterns with Local Robots in the OBLOT Model
Apr 04, 2024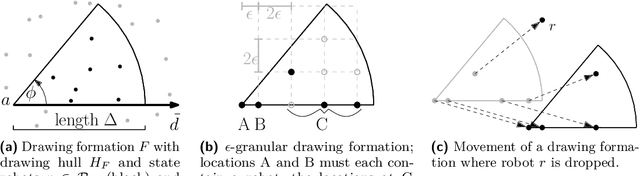
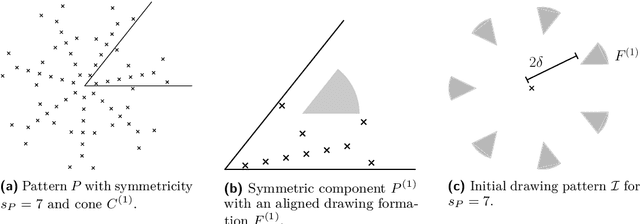
In the arbitrary pattern formation problem, $n$ autonomous, mobile robots must form an arbitrary pattern $P \subseteq \mathbb{R}^2$. The (deterministic) robots are typically assumed to be indistinguishable, disoriented, and unable to communicate. An important distinction is whether robots have memory and/or a limited viewing range. Previous work managed to form $P$ under a natural symmetry condition if robots have no memory but an unlimited viewing range [22] or if robots have a limited viewing range but memory [25]. In the latter case, $P$ is only formed in a shrunk version that has constant diameter. Without memory and with limited viewing range, forming arbitrary patterns remains an open problem. We provide a partial solution by showing that $P$ can be formed under the same symmetry condition if the robots' initial diameter is $\leq 1$. Our protocol partitions $P$ into rotation-symmetric components and exploits the initial mutual visibility to form one cluster per component. Using a careful placement of the clusters and their robots, we show that a cluster can move in a coordinated way through its component while drawing $P$ by dropping one robot per pattern coordinate.