 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVoxeland: Probabilistic Instance-Aware Semantic Mapping with Evidence-based Uncertainty Quantification
Nov 13, 2024Robots in human-centered environments require accurate scene understanding to perform high-level tasks effectively. This understanding can be achieved through instance-aware semantic mapping, which involves reconstructing elements at the level of individual instances. Neural networks, the de facto solution for scene understanding, still face limitations such as overconfident incorrect predictions with out-of-distribution objects or generating inaccurate masks.Placing excessive reliance on these predictions makes the reconstruction susceptible to errors, reducing the robustness of the resulting maps and hampering robot operation. In this work, we propose Voxeland, a probabilistic framework for incrementally building instance-aware semantic maps. Inspired by the Theory of Evidence, Voxeland treats neural network predictions as subjective opinions regarding map instances at both geometric and semantic levels. These opinions are aggregated over time to form evidences, which are formalized through a probabilistic model. This enables us to quantify uncertainty in the reconstruction process, facilitating the identification of map areas requiring improvement (e.g. reobservation or reclassification). As one strategy to exploit this, we incorporate a Large Vision-Language Model (LVLM) to perform semantic level disambiguation for instances with high uncertainty. Results from the standard benchmarking on the publicly available SceneNN dataset demonstrate that Voxeland outperforms state-of-the-art methods, highlighting the benefits of incorporating and leveraging both instance- and semantic-level uncertainties to enhance reconstruction robustness. This is further validated through qualitative experiments conducted on the real-world ScanNet dataset.
Robotic Gas Source Localization with Probabilistic Mapping and Online Dispersion Simulation
Apr 18, 2023

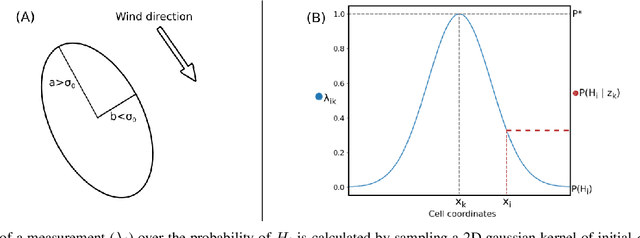

Gas source localization (GSL) with an autonomous robot is a problem with many prospective applications, from finding pipe leaks to emergency-response scenarios. In this work we present a new method to perform GSL in realistic indoor environments, featuring obstacles and turbulent flow. Given the highly complex relationship between the source position and the measurements available to the robot (the single-point gas concentration, and the wind vector) we propose an observation model that derives from contrasting the online, real-time simulation of the gas dispersion from any candidate source localization against a gas concentration map built from sensor readings. To account for a convenient and grounded integration of both into a probabilistic estimation framework, we introduce the concept of probabilistic gas-hit maps, which provide a higher level of abstraction to model the time-dependent nature of gas dispersion. Results from both simulated and real experiments show the capabilities of our current proposal to deal with source localization in complex indoor environments. To the best of our knowledge, this is the first work in olfactory robotics that doesn't make simplistic assumptions about environmental conditions like operating in open spaces and/or having an unrealistic laminar flow wind.