 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVehicle Emissions Prediction with Physics-Aware AI Models: Preliminary Results
May 02, 2021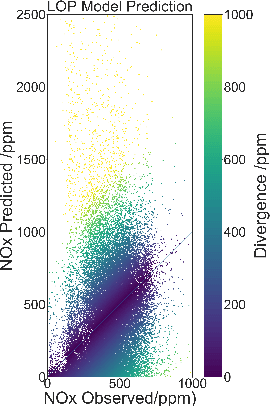

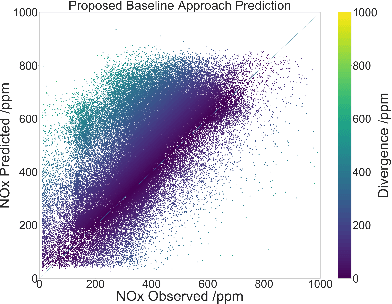
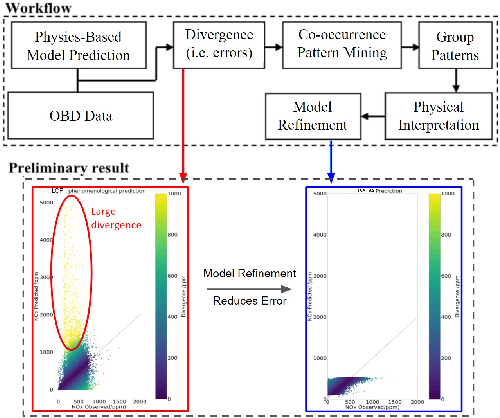
Given an on-board diagnostics (OBD) dataset and a physics-based emissions prediction model, this paper aims to develop an accurate and computational-efficient AI (Artificial Intelligence) method that predicts vehicle emissions. The problem is of societal importance because vehicular emissions lead to climate change and impact human health. This problem is challenging because the OBD data does not contain enough parameters needed by high-order physics models. Conversely, related work has shown that low-order physics models have poor predictive accuracy when using available OBD data. This paper uses a divergent window co-occurrence pattern detection method to develop a spatiotemporal variability-aware AI model for predicting emission values from the OBD datasets. We conducted a case study using real-world OBD data from a local public transportation agency. Results show that the proposed AI method has approximately 65% improved predictive accuracy than a non-AI low-order physics model and is approximately 35% more accurate than a baseline model.
Adversarial Attacks on Reinforcement Learning based Energy Management Systems of Extended Range Electric Delivery Vehicles
Jun 01, 2020



Adversarial examples are firstly investigated in the area of computer vision: by adding some carefully designed ''noise'' to the original input image, the perturbed image that cannot be distinguished from the original one by human, can fool a well-trained classifier easily. In recent years, researchers also demonstrated that adversarial examples can mislead deep reinforcement learning (DRL) agents on playing video games using image inputs with similar methods. However, although DRL has been more and more popular in the area of intelligent transportation systems, there is little research investigating the impacts of adversarial attacks on them, especially for algorithms that do not take images as inputs. In this work, we investigated several fast methods to generate adversarial examples to significantly degrade the performance of a well-trained DRL- based energy management system of an extended range electric delivery vehicle. The perturbed inputs are low-dimensional state representations and close to the original inputs quantified by different kinds of norms. Our work shows that, to apply DRL agents on real-world transportation systems, adversarial examples in the form of cyber-attack should be considered carefully, especially for applications that may lead to serious safety issues.
A Physics Model-Guided Online Bayesian Framework for Energy Management of Extended Range Electric Delivery Vehicles
Jun 01, 2020
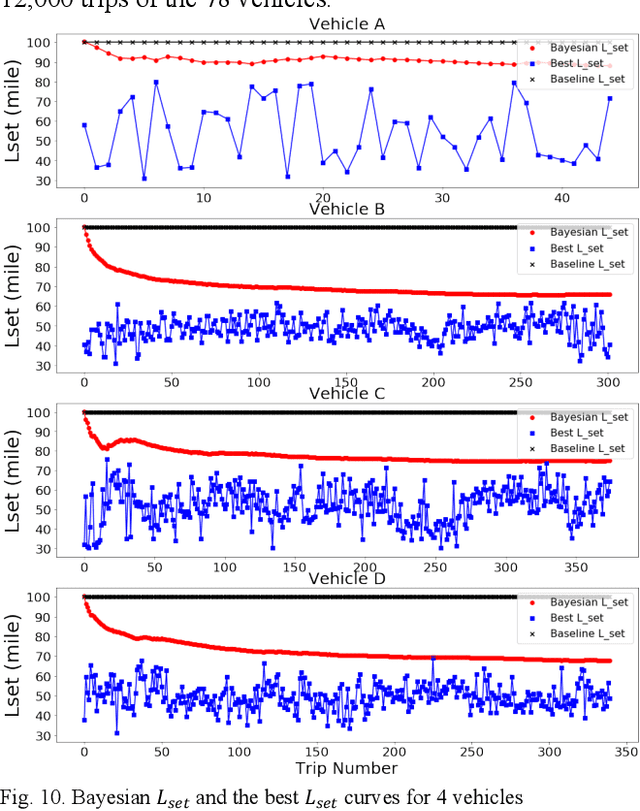
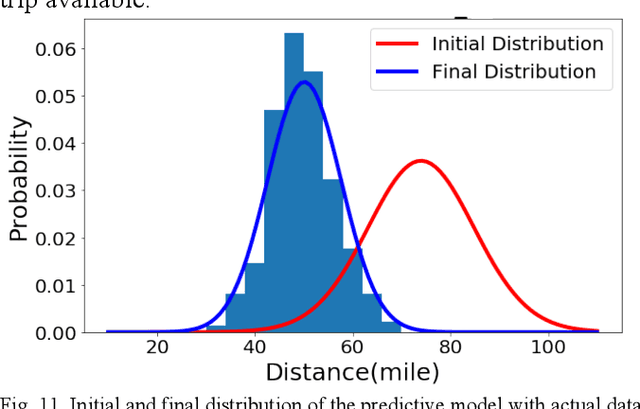

Increasing the fuel economy of hybrid electric vehicles (HEVs) and extended range electric vehicles (EREVs) through optimization-based energy management strategies (EMS) has been an active research area in transportation. However, it is difficult to apply optimization-based EMS to current in-use EREVs because insufficient knowledge is known about future trips, and because such methods are computationally expensive for large-scale deployment. As a result, most past research has been validated on standard driving cycles or on recorded high-resolution data from past real driving cycles. This paper improves an in-use rule-based EMS that is used in a delivery vehicle fleet equipped with two-way vehicle-to-cloud connectivity. A physics model-guided online Bayesian framework is described and validated on large number of in-use driving samples of EREVs used for last-mile package delivery. The framework includes: a database, a preprocessing module, a vehicle model and an online Bayesian algorithm module. It uses historical 0.2 Hz resolution trip data as input and outputs an updated parameter to the engine control logic on the vehicle to reduce fuel consumption on the next trip. The key contribution of this work is a framework that provides an immediate solution for fuel use reduction of in-use EREVs. The framework was also demonstrated on real-world EREVs delivery vehicles operating on actual routes. The results show an average of 12.8% fuel use reduction among tested vehicles for 155 real delivery trips. The presented framework is extendable to other EREV applications including passenger vehicles, transit buses, and other vocational vehicles whose trips are similar day-to-day.