 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEarly High-Frequency Injection for Geometry-Sensitive OOD Detection
May 20, 2026Post-hoc OOD detectors score logits or features after training, so their success depends on the geometry already encoded in the representation. We revisit this assumption through a band-wise MMD^2 analysis across CE, SimCLR, SupCon, and the OOD-oriented representation method PALM. In our diagnostic, low-frequency input bands induce weaker ID/OOD feature discrepancy, whereas higher-frequency bands tend to provide stronger separability. This observation motivates EIHF, an input-side intervention that exposes high-frequency evidence before the first convolution without changing the training objective. EIHF is strongest for geometry-sensitive OOD detection: under matched training and scoring settings, it reshapes class-conditional feature geometry and reduces ID/OOD Mahalanobis score overlap. Experiments on CIFAR-100 and ImageNet-100 show gains on CIFAR-100 and the best average FPR95 with second-best average AUROC on ImageNet-100, while also revealing a limitation on the scene-centric Places shift. Code is available at https://anonymous.4open.science/r/EIHF.
GAMR: Geometric-Aware Manifold Regularization with Virtual Outlier Synthesis for Learning with Noisy Labels
May 20, 2026Deep neural networks (DNNs) experience significant performance degradation when processing noisy labels, primarily due to overfitting on mislabeled data. Current mainstream approaches attempt to mitigate this issue by passively filtering clean samples during training. However, simple sample filtering within feature spaces degraded by noise struggles to distinguish between challenging samples and noisy samples, creating a bottleneck for model performance. We highlight for the first time the fundamental importance of actively reshaping feature space geometry for learning from noisy data. We propose a novel Geometry-aware Manifold Regularization Paradigm whose core idea is to explicitly construct energy barriers between data manifolds by actively synthesizing virtual outlier samples. By imposing geometric constraints that promote intra-class compactness and inter-class separation, this approach enhances the discriminability between hard and noisy samples, leading to the learning of more robust representations. Our regularization mechanism exhibits high universality, with effectiveness independent of any prior assumptions about noise patterns. It can be integrated as a standalone mechanism into existing sample selection frameworks, providing stronger robustness against diverse noisy environments. Experiments demonstrate that our paradigm achieves performance surpassing current state-of-the-art (SOTA) methods on multiple benchmarks, including CIFAR-10, with particularly pronounced advantages under more challenging asymmetric noise conditions. Furthermore, this paradigm significantly enhances the model's capability in Out-of-Distribution (OOD) detection, ensuring superior reliability and safety for deployment in open-world scenarios.
Breaking Semantic Hegemony: Decoupling Principal and Residual Subspaces for Generalized OOD Detection
Feb 05, 2026While feature-based post-hoc methods have made significant strides in Out-of-Distribution (OOD) detection, we uncover a counter-intuitive Simplicity Paradox in existing state-of-the-art (SOTA) models: these models exhibit keen sensitivity in distinguishing semantically subtle OOD samples but suffer from severe Geometric Blindness when confronting structurally distinct yet semantically simple samples or high-frequency sensor noise. We attribute this phenomenon to Semantic Hegemony within the deep feature space and reveal its mathematical essence through the lens of Neural Collapse. Theoretical analysis demonstrates that the spectral concentration bias, induced by the high variance of the principal subspace, numerically masks the structural distribution shift signals that should be significant in the residual subspace. To address this issue, we propose D-KNN, a training-free, plug-and-play geometric decoupling framework. This method utilizes orthogonal decomposition to explicitly separate semantic components from structural residuals and introduces a dual-space calibration mechanism to reactivate the model's sensitivity to weak residual signals. Extensive experiments demonstrate that D-KNN effectively breaks Semantic Hegemony, establishing new SOTA performance on both CIFAR and ImageNet benchmarks. Notably, in resolving the Simplicity Paradox, it reduces the FPR95 from 31.3% to 2.3%; when addressing sensor failures such as Gaussian noise, it boosts the detection performance (AUROC) from a baseline of 79.7% to 94.9%.
VMF-GOS: Geometry-guided virtual Outlier Synthesis for Long-Tailed OOD Detection
Feb 05, 2026Out-of-Distribution (OOD) detection under long-tailed distributions is a highly challenging task because the scarcity of samples in tail classes leads to blurred decision boundaries in the feature space. Current state-of-the-art (sota) methods typically employ Outlier Exposure (OE) strategies, relying on large-scale real external datasets (such as 80 Million Tiny Images) to regularize the feature space. However, this dependence on external data often becomes infeasible in practical deployment due to high data acquisition costs and privacy sensitivity. To this end, we propose a novel data-free framework aimed at completely eliminating reliance on external datasets while maintaining superior detection performance. We introduce a Geometry-guided virtual Outlier Synthesis (GOS) strategy that models statistical properties using the von Mises-Fisher (vMF) distribution on a hypersphere. Specifically, we locate a low-likelihood annulus in the feature space and perform directional sampling of virtual outliers in this region. Simultaneously, we introduce a new Dual-Granularity Semantic Loss (DGS) that utilizes contrastive learning to maximize the distinction between in-distribution (ID) features and these synthesized boundary outliers. Extensive experiments on benchmarks such as CIFAR-LT demonstrate that our method outperforms sota approaches that utilize external real images.
Harnessing Joint Rain-/Detail-aware Representations to Eliminate Intricate Rains
Apr 18, 2024


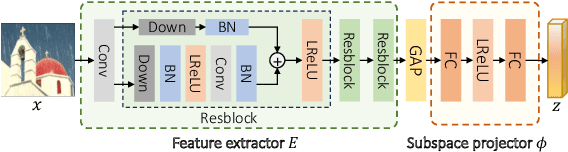
Recent advances in image deraining have focused on training powerful models on mixed multiple datasets comprising diverse rain types and backgrounds. However, this approach tends to overlook the inherent differences among rainy images, leading to suboptimal results. To overcome this limitation, we focus on addressing various rainy images by delving into meaningful representations that encapsulate both the rain and background components. Leveraging these representations as instructive guidance, we put forth a Context-based Instance-level Modulation (CoI-M) mechanism adept at efficiently modulating CNN- or Transformer-based models. Furthermore, we devise a rain-/detail-aware contrastive learning strategy to help extract joint rain-/detail-aware representations. By integrating CoI-M with the rain-/detail-aware Contrastive learning, we develop CoIC, an innovative and potent algorithm tailored for training models on mixed datasets. Moreover, CoIC offers insight into modeling relationships of datasets, quantitatively assessing the impact of rain and details on restoration, and unveiling distinct behaviors of models given diverse inputs. Extensive experiments validate the efficacy of CoIC in boosting the deraining ability of CNN and Transformer models. CoIC also enhances the deraining prowess remarkably when real-world dataset is included.
* 21 pages, 14 figures
TRNR: Task-Driven Image Rain and Noise Removal with a Few Images Based on Patch Analysis
Dec 03, 2021



The recent prosperity of learning-based image rain and noise removal is mainly due to the well-designed neural network architectures and large labeled datasets. However, we find that current image rain and noise removal methods result in low utilization of images. To alleviate the reliance on large labeled datasets, we propose the task-driven image rain and noise removal (TRNR) based on the introduced patch analysis strategy. The patch analysis strategy provides image patches with various spatial and statistical properties for training and has been verified to increase the utilization of images. Further, the patch analysis strategy motivates us to consider learning image rain and noise removal task-driven instead of data-driven. Therefore we introduce the N-frequency-K-shot learning task for TRNR. Each N-frequency-K-shot learning task is based on a tiny dataset containing NK image patches sampled by the patch analysis strategy. TRNR enables neural networks to learn from abundant N-frequency-K-shot learning tasks other than from adequate data. To verify the effectiveness of TRNR, we build a light Multi-Scale Residual Network (MSResNet) with about 0.9M parameters to learn image rain removal and use a simple ResNet with about 1.2M parameters dubbed DNNet for blind gaussian noise removal with a few images (for example, 20.0% train-set of Rain100H). Experimental results demonstrate that TRNR enables MSResNet to learn better from fewer images. In addition, MSResNet and DNNet utilizing TRNR have obtained better performance than most recent deep learning methods trained data-driven on large labeled datasets. These experimental results have confirmed the effectiveness and superiority of the proposed TRNR. The codes of TRNR will be public soon.