 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSynfeal: A Data-Driven Simulator for End-to-End Camera Localization
May 29, 2023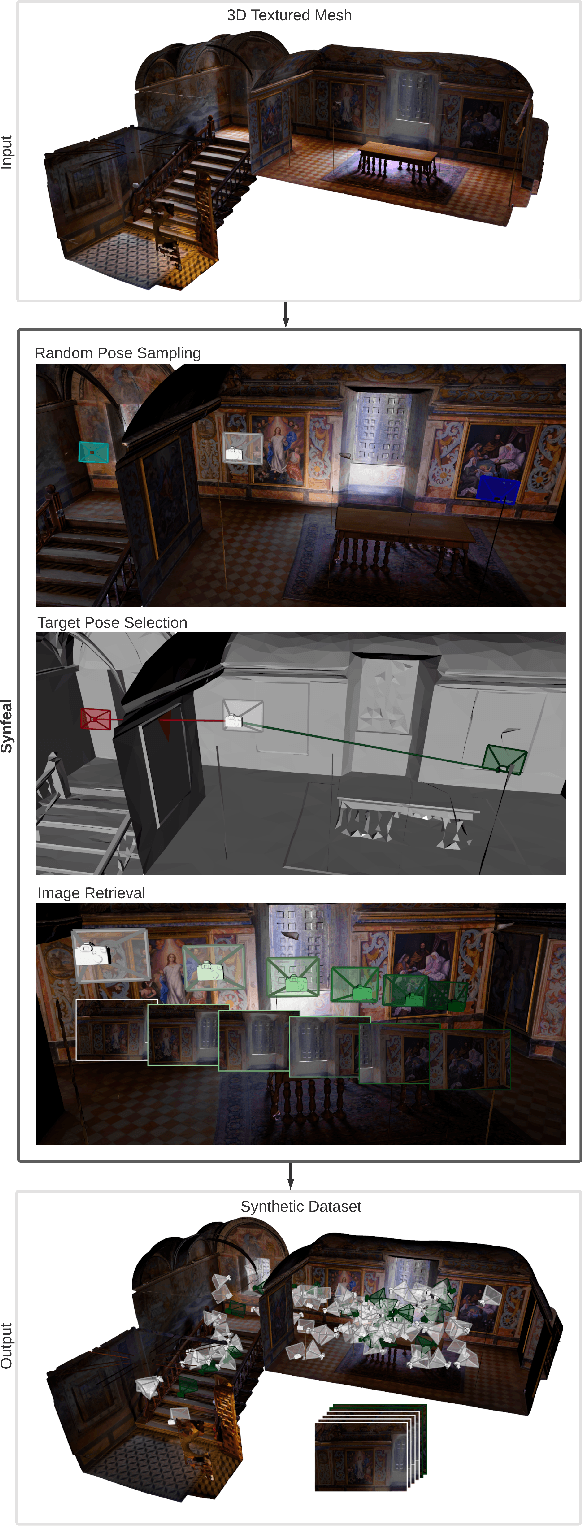

Collecting real-world data is often considered the bottleneck of Artificial Intelligence, stalling the research progress in several fields, one of which is camera localization. End-to-end camera localization methods are still outperformed by traditional methods, and we argue that the inconsistencies associated with the data collection techniques are restraining the potential of end-to-end methods. Inspired by the recent data-centric paradigm, we propose a framework that synthesizes large localization datasets based on realistic 3D reconstructions of the real world. Our framework, termed Synfeal: Synthetic from Real, is an open-source, data-driven simulator that synthesizes RGB images by moving a virtual camera through a realistic 3D textured mesh, while collecting the corresponding ground-truth camera poses. The results validate that the training of camera localization algorithms on datasets generated by Synfeal leads to better results when compared to datasets generated by state-of-the-art methods. Using Synfeal, we conducted the first analysis of the relationship between the size of the dataset and the performance of camera localization algorithms. Results show that the performance significantly increases with the dataset size. Our results also suggest that when a large localization dataset with high quality is available, training from scratch leads to better performances. Synfeal is publicly available at https://github.com/DanielCoelho112/synfeal.