 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign of an innovative robotic surgical instrument for circular stapling
Jun 11, 2025Esophageal cancer remains a highly aggressive malignancy with low survival rates, requiring advanced surgical interventions like esophagectomy. Traditional manual techniques, including circular staplers, face challenges such as limited precision, prolonged recovery times, and complications like leaks and tissue misalignment. This paper presents a novel robotic circular stapler designed to enhance the dexterity in confined spaces, improve tissue alignment, and reduce post-operative risks. Integrated with a cognitive robot that serves as a surgeon's assistant, the surgical stapler uses three actuators to perform anvil motion, cutter/stapler motion and allows a 75-degree bending of the cartridge (distal tip). Kinematic analysis is used to compute the stapler tip's position, ensuring synchronization with a robotic system.
The control architecture of a spherical robot for Minimally Invasive Surgery
Jul 11, 2024Control systems used in Minimally Invasive Surgery (MIS) play a crucial role in ensuring preci-sion and safety throughout procedures. This paper presents a control architecture developed for a robotic system designed for MIS operations. The modular structure of the control system allows for compatibility with a range of procedures in abdominal and thoracic regions. The proposed control system, employing the master-slave concept, is presented alongside the experimental model. Functional validation is obtained by performing a Siemens NX simulation and comparing the results with several experimental runs using the experimental model of the robot. With its compact size and stiffness, the system holds promise for integration with other robotic systems. Future efforts will be dedicated to exploring and optimizing this potential collaboration to enhance the overall capabilities of robotic-assisted surgery.
Kinematic analysis of a parallel robot for minimally invasive surgery
Jun 04, 2024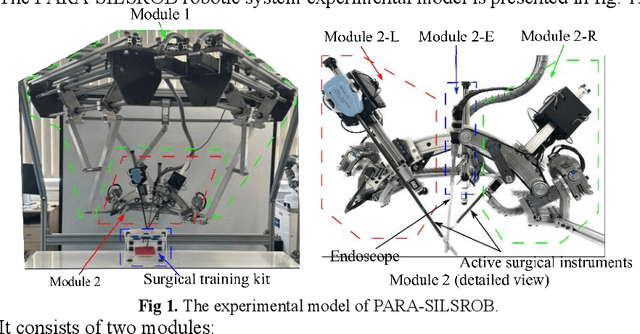

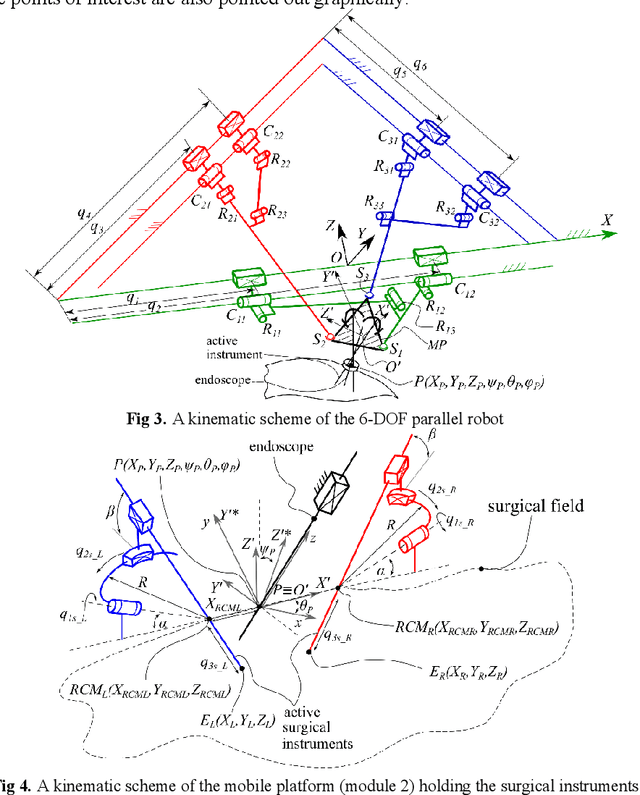
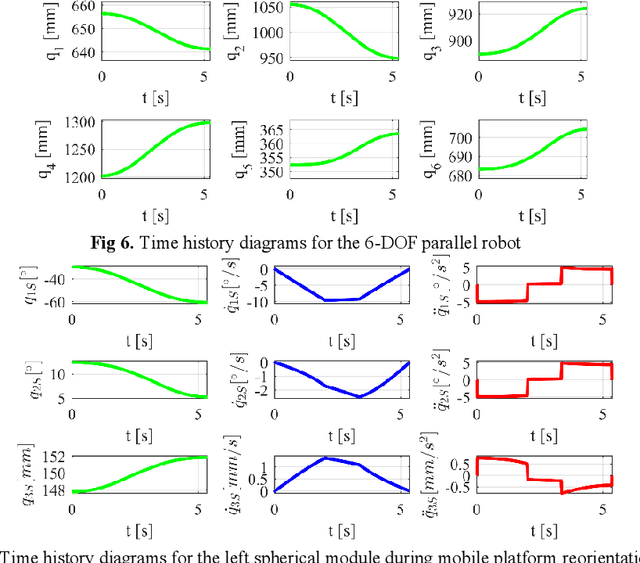
The paper presents the kinematic modelling for the coupled motion of a 6-DOF surgical parallel robot PARA-SILSROB which guides a mobile platform carrying the surgical instruments, and the actuators of the sub-modules which hold these tools. To increase the surgical procedure safety, a closed form solution for the kinematic model is derived and then, the forward and inverse kinematic models for the mobile orientation platform are obtained. The kinematic models are used in numerical simulations for the reorientation of the endoscopic camera, which imposes an automated compensatory motion from the active instruments' mod-ules.
Accuracy and repeatability of a parallel robot for personalised minimally invasive surgery
Apr 17, 2024The paper presents the methodology used for accuracy and repeatability measurements of the experimental model of a parallel robot developed for surgical applications. The experimental setup uses a motion tracking system (for accuracy) and a high precision measuring arm for position (for repeatability). The accuracy was obtained by comparing the trajectory data from the experimental measurement with a baseline trajectory defined with the kinematic models of the parallel robotic system. The repeatability was experi-mentally determined by moving (repeatedly) the robot platform in predefined points.
Mixed-Reality-Guided Teleoperation of a Collaborative Robot for Surgical Procedures
Feb 19, 2024



The development of advanced surgical systems embedding the Master-Slave control strategy introduced the possibility of remote interaction between the surgeon and the patient, also known as teleoperation. The present paper aims to integrate innovative technologies into the teleoperation process to enhance workflow during surgeries. The proposed system incorporates a collaborative robot, Kuka IIWA LBR, and Hololens 2 (an augmented reality device), allowing the user to control the robot in an expansive environment that integrates actual (real data) with additional digital information imported via Hololens 2. Experimental data demonstrate the user's ability to control the Kuka IIWA using various gestures to position it with respect to real or digital objects. Thus, this system offers a novel solution to manipulate robots used in surgeries in a more intuitive manner, contributing to the reduction of the learning curve for surgeons. Calibration and testing in multiple scenarios demonstrate the efficiency of the system in providing seamless movements.