Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKinematic analysis of a parallel robot for minimally invasive surgery
Paper and Code
Jun 04, 2024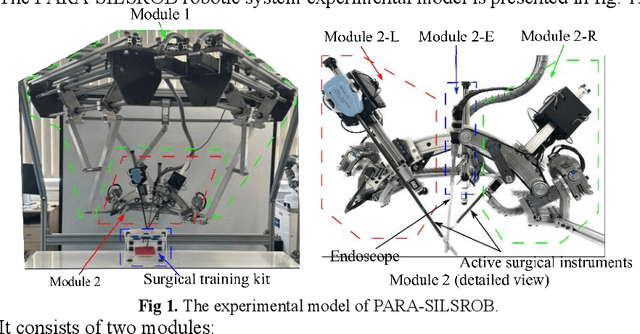

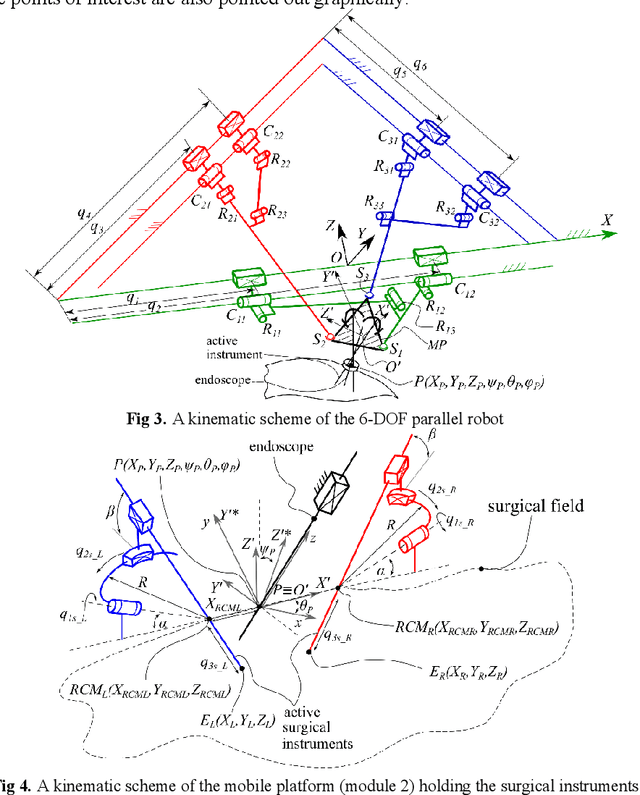
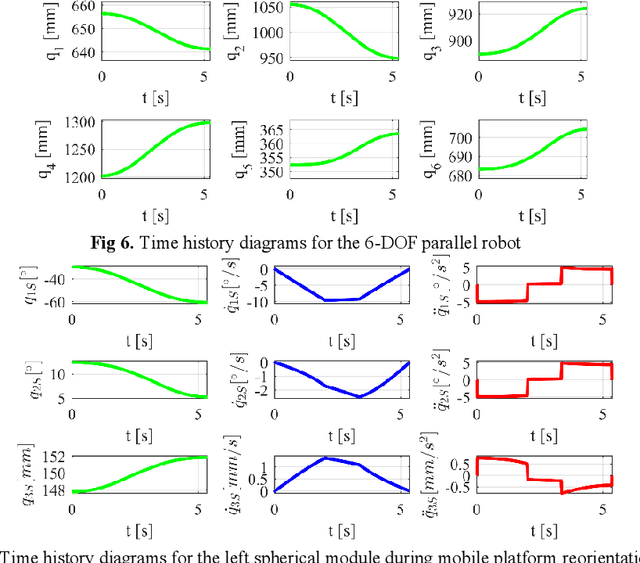
The paper presents the kinematic modelling for the coupled motion of a 6-DOF surgical parallel robot PARA-SILSROB which guides a mobile platform carrying the surgical instruments, and the actuators of the sub-modules which hold these tools. To increase the surgical procedure safety, a closed form solution for the kinematic model is derived and then, the forward and inverse kinematic models for the mobile orientation platform are obtained. The kinematic models are used in numerical simulations for the reorientation of the endoscopic camera, which imposes an automated compensatory motion from the active instruments' mod-ules.
* 19th International Symposium on Advances in Robot Kinematics,
Springer, 2024
View paper on