 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn analysis of higher-order kinematics formalisms for an innovative surgical parallel robot
Mar 27, 2025The paper presents a novel modular hybrid parallel robot for pancreatic surgery and its higher-order kinematics derived based on various formalisms. The classical vector, homogeneous transformation matrices and dual quaternion approaches are studied for the kinematic functions using both classical differentiation and multidual algebra. The algorithms for inverse kinematics for all three studied formalisms are presented for both differentiation and multidual algebra approaches. Furthermore, these algorithms are compared based on numerical stability, execution times and number and type of mathematical functions and operators contained in each algorithm. A statistical analysis shows that there is significant improvement in execution time for the algorithms implemented using multidual algebra, while the numerical stability is appropriate for all algorithms derived based on differentiation and multidual algebra. While the implementation of the kinematic algorithms using multidual algebra shows positive results when benchmarked on a standard PC, further work is required to evaluate the multidual algorithms on hardware/software used for the modular parallel robot command and control.
Continuous-Time Robust Control for Cancer Treatment Robots
Jul 23, 2024The control system in surgical robots must ensure patient safety and real time control. As such, all the uncertainties which could appear should be considered into an extended model of the plant. After such an uncertain plant is formed, an adequate controller which ensures a minimum set of performances for each situation should be computed. As such, the continuous-time robust control paradigm is suitable for such scenarios. However, the problem is generally solved only for linear and time invariant plants. The main focus of the current paper is to include m-link serial surgical robots into Robust Control Framework by considering all nonlinearities as uncertainties. Moreover, the paper studies an incipient problem of numerical implementation of such control structures.
Kinematic analysis of a parallel robot for minimally invasive surgery
Jun 04, 2024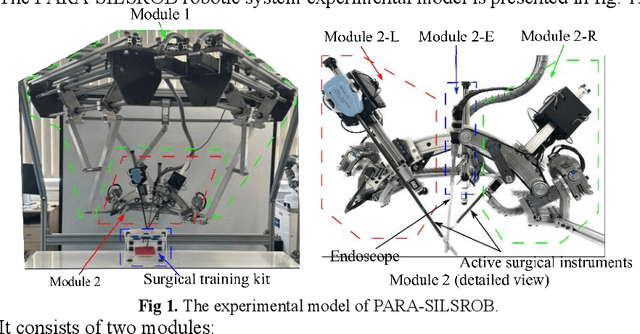

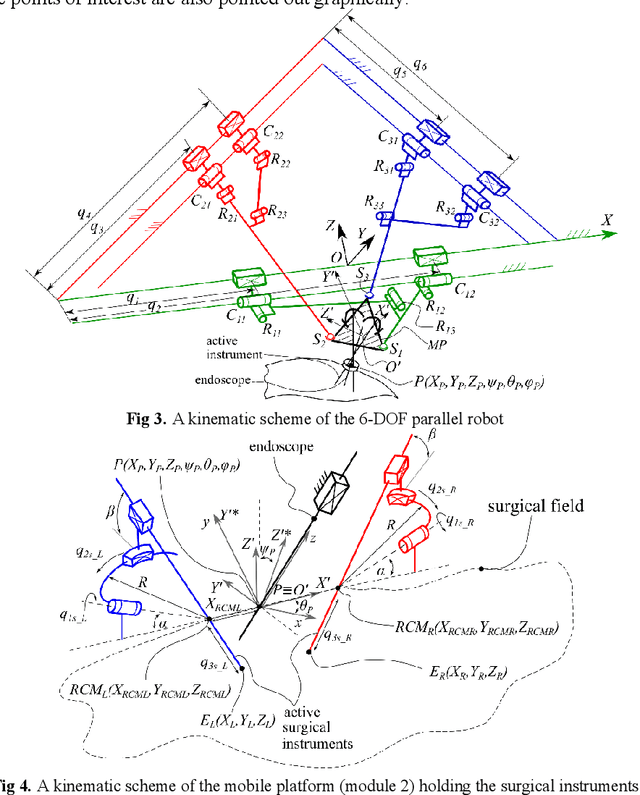
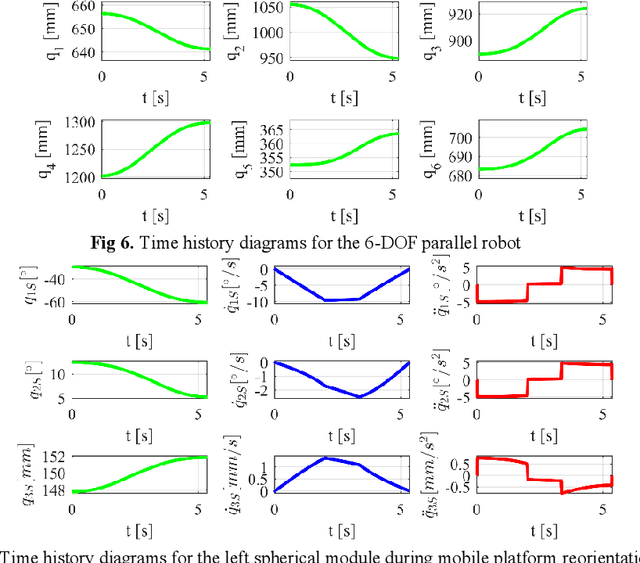
The paper presents the kinematic modelling for the coupled motion of a 6-DOF surgical parallel robot PARA-SILSROB which guides a mobile platform carrying the surgical instruments, and the actuators of the sub-modules which hold these tools. To increase the surgical procedure safety, a closed form solution for the kinematic model is derived and then, the forward and inverse kinematic models for the mobile orientation platform are obtained. The kinematic models are used in numerical simulations for the reorientation of the endoscopic camera, which imposes an automated compensatory motion from the active instruments' mod-ules.