 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluation of Grid-based Uncertainty Propagation for Collaborative Self-Calibration in Indoor Positioning Systems
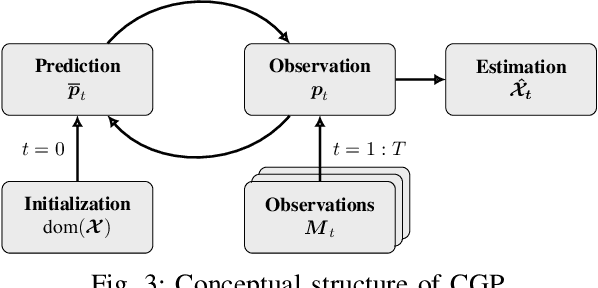
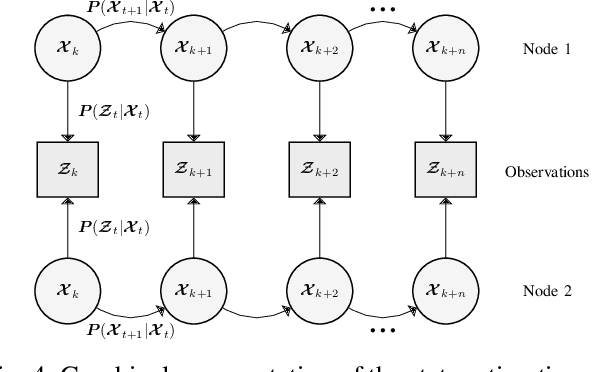
Nov 13, 2025Radio-based localization systems conventionally require stationary reference points (e.g. anchors) with precisely surveyed positions, making deployment time-consuming and costly. This paper presents an empirical evaluation of collaborative self-calibration for Ultra-Wideband (UWB) networks, extending a discrete Bayesian approach based on grid-based uncertainty propagation. The enhanced algorithm reduces measurement availability requirements while maintaining positioning accuracy through probabilistic state estimation. We validate the approach using real-world data from controlled indoor UWB network experiments with 12 nodes in a static environment. Experimental evaluation demonstrates 0.28~m mean ranging error under line-of-sight conditions and 1.11~m overall ranging error across mixed propagation scenarios, achieving sub-meter positioning accuracy. Results demonstrate the algorithm's robustness to measurement noise and partial connectivity scenarios typical in industrial deployments. The findings contribute to automated UWB network initialization for indoor positioning applications, reducing infrastructure dependency compared to manual anchor calibration procedures.
Simulation-based Evaluation of Indoor Positioning Systems in Connected Aircraft Cabins
Dec 14, 2023The manuscript discusses the increasing use of location-aware radio communication systems to support operational processes for the demanding aircraft cabin environment. In this context, the challenges for evaluation and integration of radio-based localization systems in the connected cabin are specifically addressed by proposing a hybrid deterministic and stochastic simulation approach, including both model-based ray-tracing and empirical residual simulation. The simulation approach is detailed in the manuscript and a methodology for applying and evaluating localization methods based on obtained geometric relations is conducted. This can also be used as a data generation and validation tool for data-driven localization methods, which further increase the localization accuracy and robustness. The derived location information can in return be used in order to perform operational prediction and optimization for efficient and sustainable passenger handling. A dataset derived from the introduced simulation platform is publicly available.
Potentials of Deterministic Radio Propagation Simulation for AI-Enabled Localization and Sensing
Sep 11, 2023Machine leaning (ML) and artificial intelligence (AI) enable new methods for localization and sensing in next-generation networks to fulfill a wide range of use cases. These approaches rely on learning approaches that require large amounts of training and validation data. This paper addresses the data generation bottleneck to develop and validate such methods by proposing an integrated toolchain based on deterministic channel modeling and radio propagation simulation. The toolchain is demonstrated exemplary for scenario classification to obtain localization-related channel parameters within an aircraft cabin environment.
Grid-based Hybrid 3DMA GNSS and Terrestrial Positioning
Sep 11, 2023



The paper discusses the increasing use of hybridized sensor information for GNSS-based localization and navigation, including the use of 3D map-aided GNSS positioning and terrestrial systems based on different geometric measurement principles. However, both GNSS and terrestrial systems are subject to negative impacts from the propagation environment, which can violate the assumptions of conventionally applied parametric state estimators. Furthermore, dynamic parametric state estimation does not account for multi-modalities within the state space leading to an information loss within the prediction step. In addition, the synchronization of non-deterministic multi-rate measurement systems needs to be accounted. In order to address these challenges, the paper proposes the use of a non-parametric filtering method, specifically a 3DMA multi-epoch Grid Filter, for the tight integration of GNSS and terrestrial signals. Specifically, the fusion of GNSS, Ultra-wide Band (UWB) and vehicle motion data is introduced based on a discrete state representation. Algorithmic challenges, including the use of different measurement models and time synchronization, are addressed. In order to evaluate the proposed method, real-world tests were conducted on an urban automotive testbed in both static and dynamic scenarios. We empirically show that we achieve sub-meter accuracy in the static scenario by averaging a positioning error of $0.64$ m, whereas in the dynamic scenario the average positioning error amounts to $1.62$ m. The paper provides a proof-of-concept of the introduced method and shows the feasibility of the inclusion of terrestrial signals in a 3DMA positioning framework in order to further enhance localization in GNSS-degraded environments.
Auto-Positioning in Radio-based Localization Systems: A Bayesian Approach
Jul 18, 2022
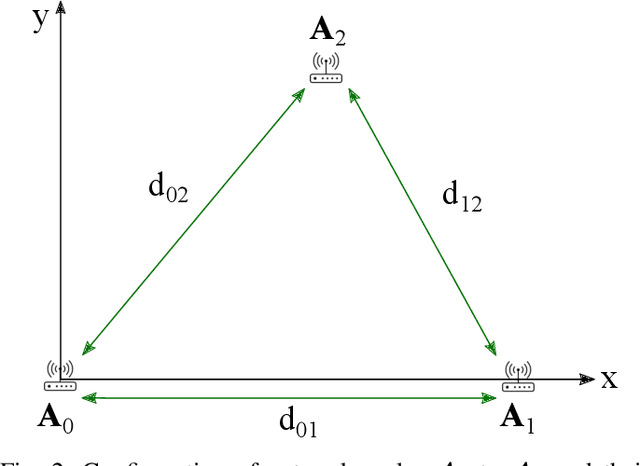
The application of radio-based positioning systems is ever increasing. In light of the dissemination of the Internet of Things and location-aware communication systems, the demands on localization architectures and amount of possible use cases steadily increases. While traditional radio-based localization is performed by utilizing stationary nodes, whose positions are absolutely referenced, collaborative auto-positioning methods aim to estimate location information without any a-priori knowledge of the node distribution. The usage of auto-positioning decreases the installation efforts of localization systems and therefore allows their market-wide dissemination. Since observations and position information in this scenario are correlated, the uncertainties of all nodes need to be considered. In this paper we propose a discrete Bayesian method based on a multi-dimensional histogram filter to solve the task of robust auto-positioning, allowing to propagate historical positions and estimated position uncertainties, as well as lowering the demands on observation availability when compared to conventional closed-form approaches. The proposed method is validated utilizing different multipath-, outlier and failure-corrupted ranging measurements in a static environment, where we obtain at least 58% higher positioning accuracy compared to a baseline closed-form auto-positioning approach.
Efficient coverage planning for full-area C-ITS communications based on radio propagation simulation and measurement tools
Feb 07, 2022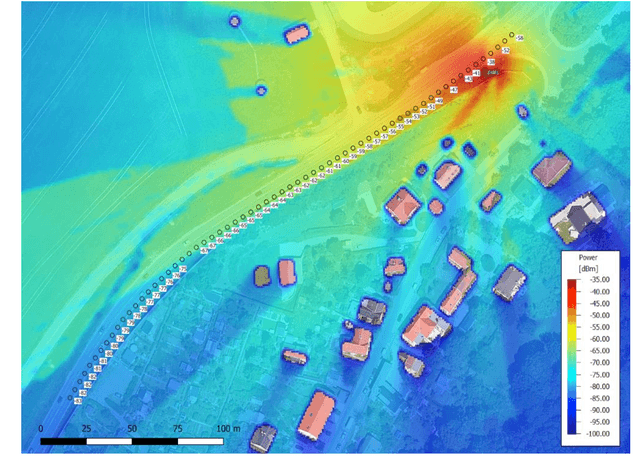
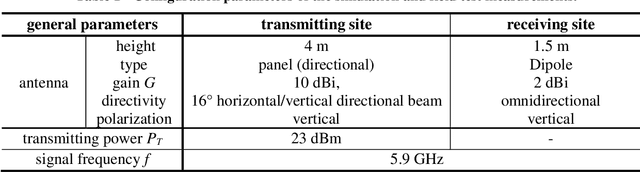

Intelligent infrastructure, currently often consisting of C-ITS stations and prospectively supplemented by 5G, is a key-enabler for application-oriented and area-wide realization of highly automated and connected driving. For this, radio coverage along the routes must be ensured, leading to high demands on location- and radio-specific planning and parameterization of roadside units (RSU). Hence, this paper presents efficient planning, measurement and evaluation methods for RSU coverage outlining, allowing economically efficient and technically secured planning of intelligent infrastructure. Necessary scientific technical steps are showcased along a 3.5 km testbed for automated and connected driving in rural environments. First, a radio propagation simulation based on a 3D environment model and its electro-magnetic properties is performed, allowing the examination and optimization of RSU quantity as well as site and antenna selection. Additionally, the necessary calibration of simulation results based on continuous wave (CW) and C-ITS service measurements in both lab-based and real-world scenarios is presented.
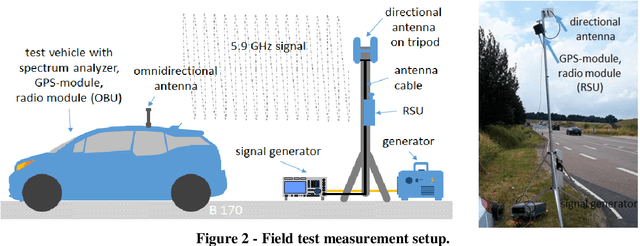
Enabling Radio Sensing for Multimodal Intelligent Transportation Systems: From Virtual Testing to Immersive Testbeds
Jan 28, 2022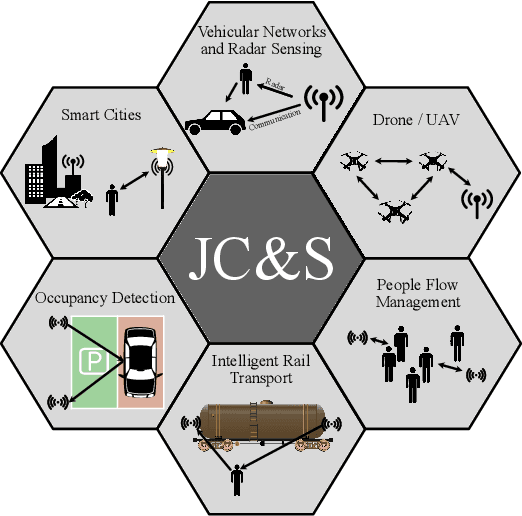

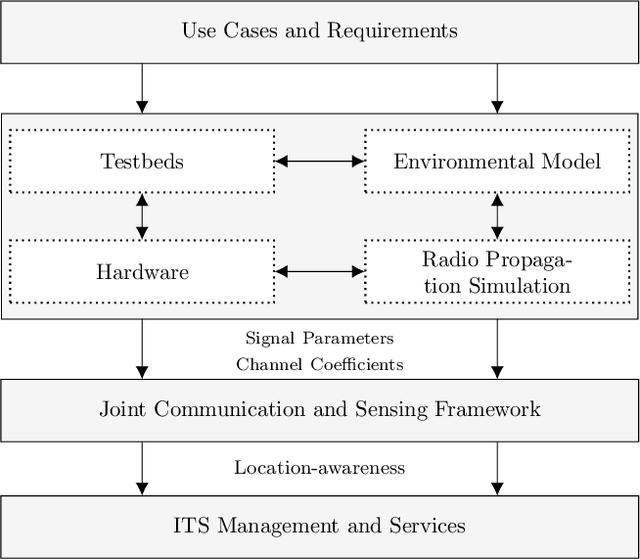
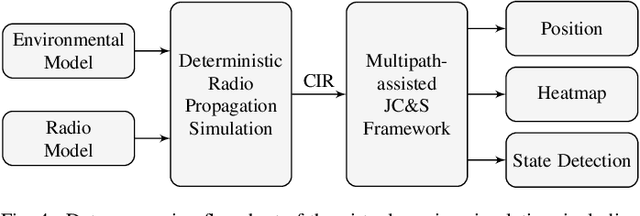
In this paper, the necessity for application-oriented development and evaluation of Joint Communication and Sensing (JC&S) applications, especially in transportation, is addressed. More specifically, an integrative evaluation chain for immersively testing JC&S location capabilities, reaching from early-stage testing, over model- and scenario-enabled ray tracing simulation, to real-world evaluation (laboratory and field testing) is presented. This includes a discussion of both challenges and requirements for location-aware applications in Intelligent Transportation Systems. Within this scope, a reproducible methodology for testing sensing and localization capabilities is derived and application scenarios are presented. This includes a proposal of a scenario-based sensing evaluation using radio propagation simulation. The paper empirically discusses a proof-of-concept of the developed method given a smart parking scenario, in which a passive occupancy detection of vehicles is performed. The conducted findings underline the need for scenario-based JC&S evaluation in both virtual and real-world environments and proposes consecutive research work.
Multipath-assisted Radio Sensing and Occupancy Detection for Smart In-house Parking in ITS
Jan 16, 2022
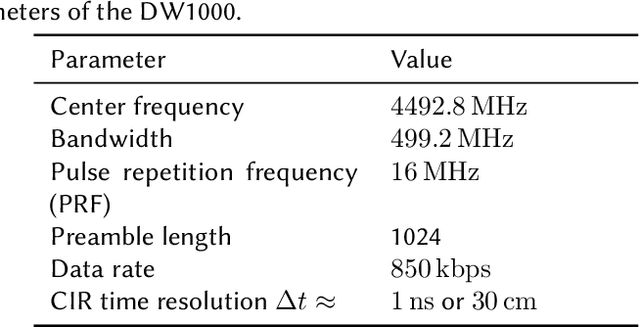
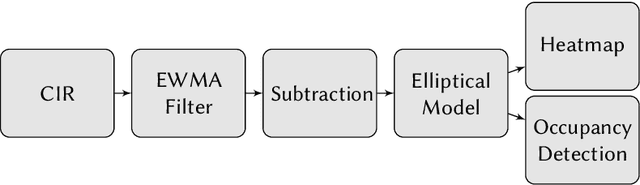

Joint, radio-based communication, localization and sensing is a rapidly emerging research field with various application potentials. Greatly benefiting from these capabilities, smart city, mobility, and logistic concepts are key components for maximizing the efficiency of modern transportation systems. In urban environments, both the search for parking space and freight transport are time- and space-consuming and present the bottlenecks for these transportation chains. Providing location information for these heterogeneous requirement profiles (both active and passive localization of objects), can be realized by using retrofittable wireless sensor networks, which are typically only deployed for active localization. An additional passive detection of objects can be achieved by assessing signal reflections and multipath properties of the transmission channel stored within the Channel Impulse Response (CIR). In this work, a proof-of-concept realization and preliminary experimental results of a CIR-based occupancy detection for parking lots are presented. As the time resolution is dependent on available bandwidth, the CIR of Ultra-wideband transceivers are used. For this, the CIR is smoothed and time-variant changes within it are detected by performing a background subtraction. Finally, the reflecting objects are mapped to individual parking lots. The developed method is tested in an in-house parking garage. The work provided is a foundation for passive occupancy detection, whose capabilities can prospectively be enhanced by exploiting additional physical layers, such as 5G or even 6G.