 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluation of Grid-based Uncertainty Propagation for Collaborative Self-Calibration in Indoor Positioning Systems
Nov 13, 2025Radio-based localization systems conventionally require stationary reference points (e.g. anchors) with precisely surveyed positions, making deployment time-consuming and costly. This paper presents an empirical evaluation of collaborative self-calibration for Ultra-Wideband (UWB) networks, extending a discrete Bayesian approach based on grid-based uncertainty propagation. The enhanced algorithm reduces measurement availability requirements while maintaining positioning accuracy through probabilistic state estimation. We validate the approach using real-world data from controlled indoor UWB network experiments with 12 nodes in a static environment. Experimental evaluation demonstrates 0.28~m mean ranging error under line-of-sight conditions and 1.11~m overall ranging error across mixed propagation scenarios, achieving sub-meter positioning accuracy. Results demonstrate the algorithm's robustness to measurement noise and partial connectivity scenarios typical in industrial deployments. The findings contribute to automated UWB network initialization for indoor positioning applications, reducing infrastructure dependency compared to manual anchor calibration procedures.
Auto-Positioning in Radio-based Localization Systems: A Bayesian Approach
Jul 18, 2022
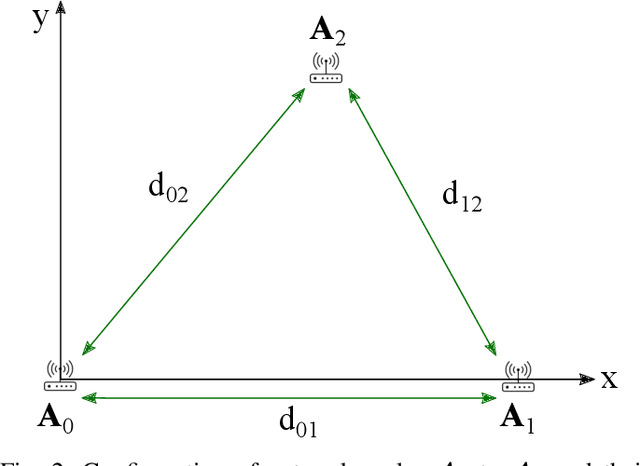
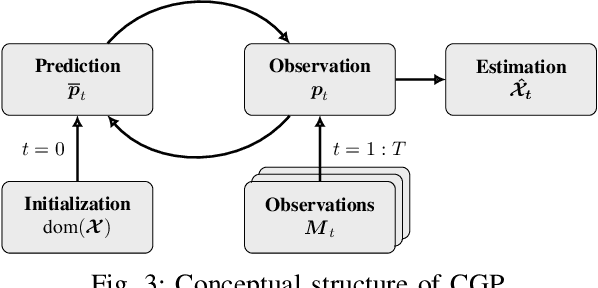
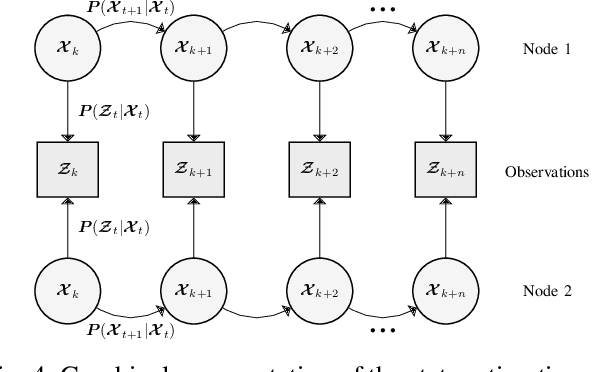
The application of radio-based positioning systems is ever increasing. In light of the dissemination of the Internet of Things and location-aware communication systems, the demands on localization architectures and amount of possible use cases steadily increases. While traditional radio-based localization is performed by utilizing stationary nodes, whose positions are absolutely referenced, collaborative auto-positioning methods aim to estimate location information without any a-priori knowledge of the node distribution. The usage of auto-positioning decreases the installation efforts of localization systems and therefore allows their market-wide dissemination. Since observations and position information in this scenario are correlated, the uncertainties of all nodes need to be considered. In this paper we propose a discrete Bayesian method based on a multi-dimensional histogram filter to solve the task of robust auto-positioning, allowing to propagate historical positions and estimated position uncertainties, as well as lowering the demands on observation availability when compared to conventional closed-form approaches. The proposed method is validated utilizing different multipath-, outlier and failure-corrupted ranging measurements in a static environment, where we obtain at least 58% higher positioning accuracy compared to a baseline closed-form auto-positioning approach.