 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHeterogeneity in Multi-Robot Environmental Monitoring for Resolving Time-Conflicting Tasks
Dec 09, 2025Multi-robot systems performing continuous tasks face a performance trade-off when interrupted by urgent, time-critical sub-tasks. We investigate this trade-off in a scenario where a team must balance area patrolling with locating an anomalous radio signal. To address this trade-off, we evaluate both behavioral heterogeneity through agent role specialization ("patrollers" and "searchers") and sensing heterogeneity (i.e., only the searchers can sense the radio signal). Through simulation, we identify the Pareto-optimal trade-offs under varying team compositions, with behaviorally heterogeneous teams demonstrating the most balanced trade-offs in the majority of cases. When sensing capability is restricted, heterogeneous teams with half of the sensing-capable agents perform comparably to homogeneous teams, providing cost-saving rationale for restricting sensor payload deployment. Our findings demonstrate that pre-deployment role and sensing specialization are powerful design considerations for multi-robot systems facing time-conflicting tasks, where varying the degree of behavioral heterogeneity can tune system performance toward either task.
Express Yourself: Enabling large-scale public events involving multi-human-swarm interaction for social applications with MOSAIX
Nov 15, 2024



Robot swarms have the potential to help groups of people with social tasks, given their ability to scale to large numbers of robots and users. Developing multi-human-swarm interaction is therefore crucial to support multiple people interacting with the swarm simultaneously - which is an area that is scarcely researched, unlike single-human, single-robot or single-human, multi-robot interaction. Moreover, most robots are still confined to laboratory settings. In this paper, we present our work with MOSAIX, a swarm of robot Tiles, that facilitated ideation at a science museum. 63 robots were used as a swarm of smart sticky notes, collecting input from the public and aggregating it based on themes, providing an evolving visualization tool that engaged visitors and fostered their participation. Our contribution lies in creating a large-scale (63 robots and 294 attendees) public event, with a completely decentralized swarm system in real-life settings. We also discuss learnings we obtained that might help future researchers create multi-human-swarm interaction with the public.
Shaping Multi-Robot Patrol Performance with Heterogeneity in Individual Learning Behavior
Mar 02, 2024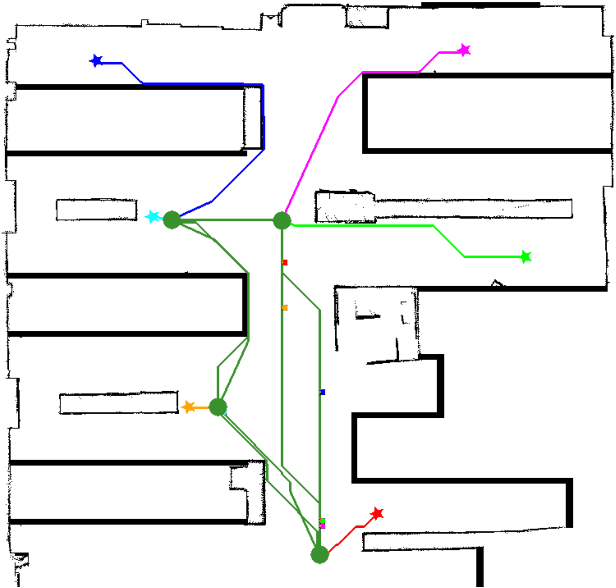
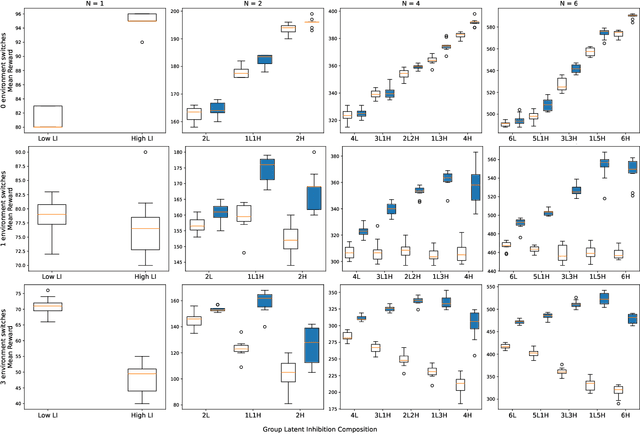
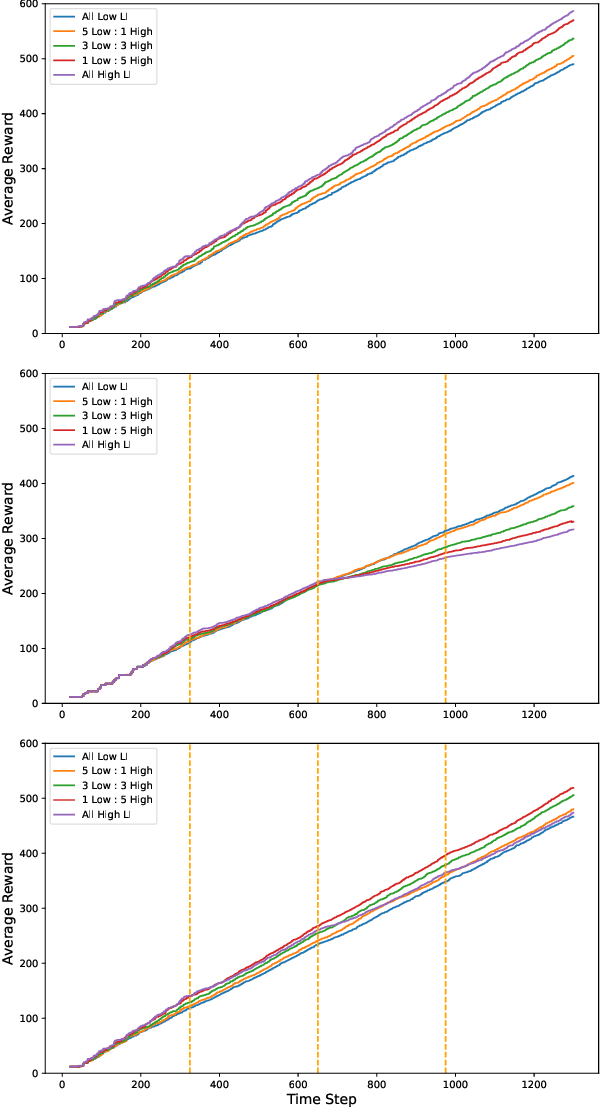
Individual differences in learning behavior within social groups, whether in humans, other animals, or among robots, can have significant effects on collective task performance. This is because it can affect individuals' response to the environment and their interactions with each other. In recent years there has been rising interest in the question of how individual differences, whether in learning or other traits, affect collective outcomes: studied, for example, in social insect foraging behavior. Multi-robot, 'swarm' systems have a heritage of bioinspiration from such examples, and here we consider whether heterogeneity in a learning behavior called latent inhibition (LI) may be useful for a team of patrolling robots tasked with environmental monitoring and anomaly detection. Individuals with high LI can be seen as better at learning to be inattentive to irrelevant or unrewarding stimuli, while low LI individuals might be seen as 'distractible' and yet, more positively, more exploratory. We introduce a simple model of the effects of LI as the probability of re-searching a location for a reward (anomalous reading) where it has previously been found to be unrewarding (irrelevant). In simulated patrols, we find that a negatively skewed distribution of mostly high LI robots, and just a single low LI robot, is collectively most effective at monitoring dynamic environments. These results are an example of 'functional heterogeneity' in 'swarm engineering' and could inform predictions for ecological distributions of learning traits within social groups.