 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTSEM: Temporally Weighted Spatiotemporal Explainable Neural Network for Multivariate Time Series
May 25, 2022



Deep learning has become a one-size-fits-all solution for technical and business domains thanks to its flexibility and adaptability. It is implemented using opaque models, which unfortunately undermines the outcome trustworthiness. In order to have a better understanding of the behavior of a system, particularly one driven by time series, a look inside a deep learning model so-called posthoc eXplainable Artificial Intelligence (XAI) approaches, is important. There are two major types of XAI for time series data, namely model-agnostic and model-specific. Model-specific approach is considered in this work. While other approaches employ either Class Activation Mapping (CAM) or Attention Mechanism, we merge the two strategies into a single system, simply called the Temporally Weighted Spatiotemporal Explainable Neural Network for Multivariate Time Series (TSEM). TSEM combines the capabilities of RNN and CNN models in such a way that RNN hidden units are employed as attention weights for the CNN feature maps temporal axis. The result shows that TSEM outperforms XCM. It is similar to STAM in terms of accuracy, while also satisfying a number of interpretability criteria, including causality, fidelity, and spatiotemporality.
A Platform-independent Programming Environment for Robot Control
Oct 05, 2010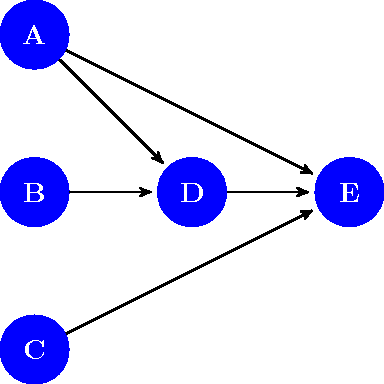
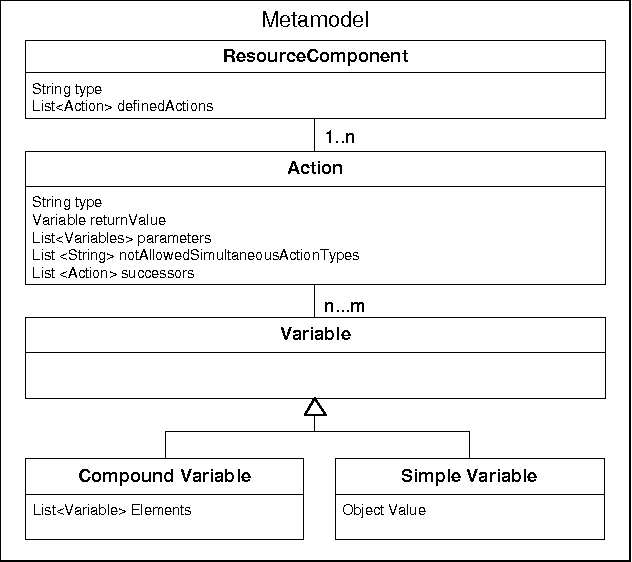
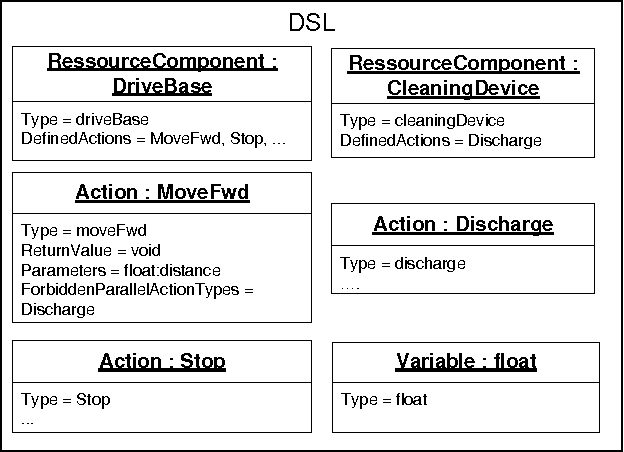

The development of robot control programs is a complex task. Many robots are different in their electrical and mechanical structure which is also reflected in the software. Specific robot software environments support the program development, but are mainly text-based and usually applied by experts in the field with profound knowledge of the target robot. This paper presents a graphical programming environment which aims to ease the development of robot control programs. In contrast to existing graphical robot programming environments, our approach focuses on the composition of parallel action sequences. The developed environment allows to schedule independent robot actions on parallel execution lines and provides mechanism to avoid side-effects of parallel actions. The developed environment is platform-independent and based on the model-driven paradigm. The feasibility of our approach is shown by the application of the sequencer to a simulated service robot and a robot for educational purpose.