 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Platform-independent Programming Environment for Robot Control
Oct 05, 2010
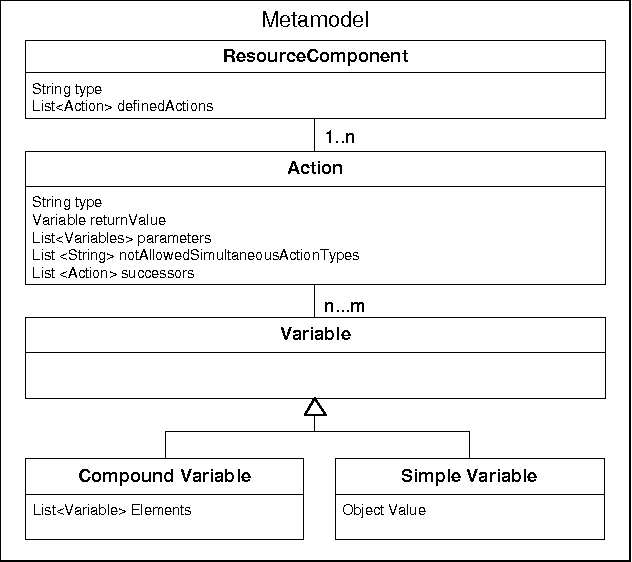
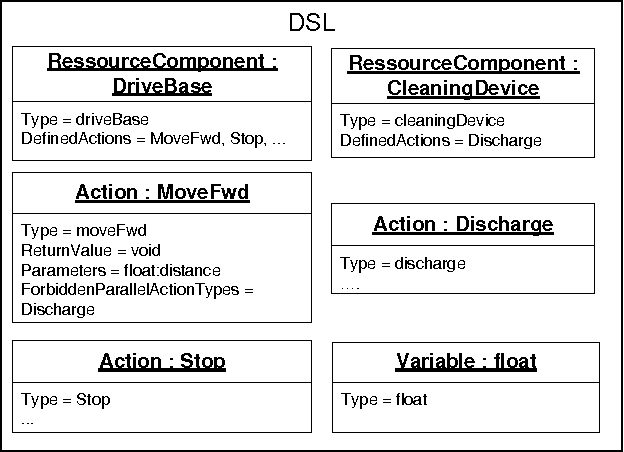

The development of robot control programs is a complex task. Many robots are different in their electrical and mechanical structure which is also reflected in the software. Specific robot software environments support the program development, but are mainly text-based and usually applied by experts in the field with profound knowledge of the target robot. This paper presents a graphical programming environment which aims to ease the development of robot control programs. In contrast to existing graphical robot programming environments, our approach focuses on the composition of parallel action sequences. The developed environment allows to schedule independent robot actions on parallel execution lines and provides mechanism to avoid side-effects of parallel actions. The developed environment is platform-independent and based on the model-driven paradigm. The feasibility of our approach is shown by the application of the sequencer to a simulated service robot and a robot for educational purpose.