 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Exploration in Soft-Actor-Critic with Normalizing Flows Policies
Jun 06, 2019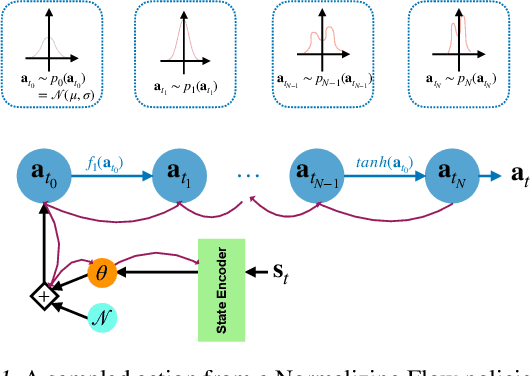
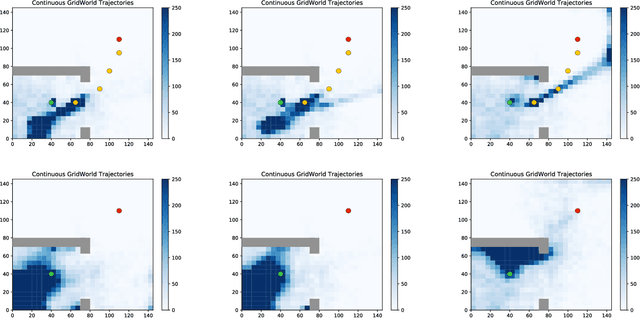
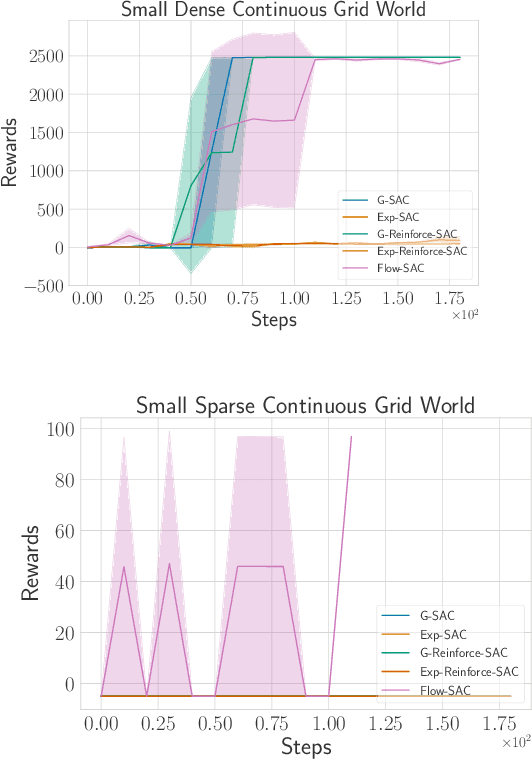
Deep Reinforcement Learning (DRL) algorithms for continuous action spaces are known to be brittle toward hyperparameters as well as \cut{being}sample inefficient. Soft Actor Critic (SAC) proposes an off-policy deep actor critic algorithm within the maximum entropy RL framework which offers greater stability and empirical gains. The choice of policy distribution, a factored Gaussian, is motivated by \cut{chosen due}its easy re-parametrization rather than its modeling power. We introduce Normalizing Flow policies within the SAC framework that learn more expressive classes of policies than simple factored Gaussians. \cut{We also present a series of stabilization tricks that enable effective training of these policies in the RL setting.}We show empirically on continuous grid world tasks that our approach increases stability and is better suited to difficult exploration in sparse reward settings.