 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeYotoR-You Only Transform One Representation
May 30, 2024


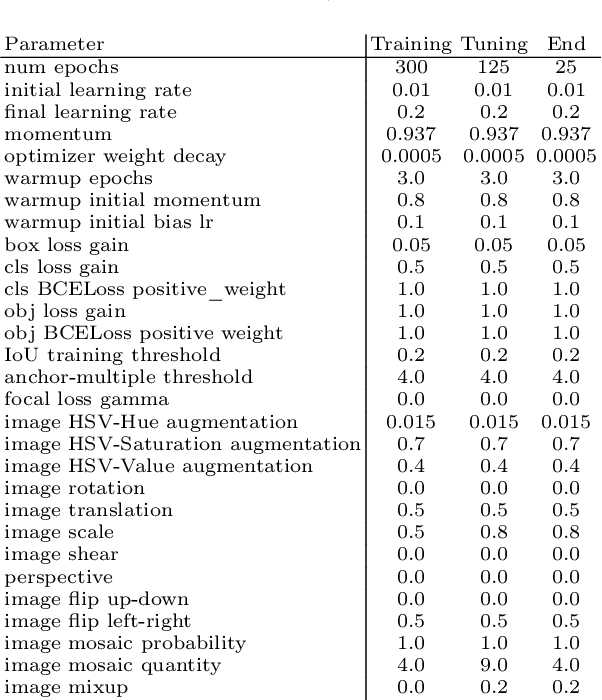
This paper introduces YotoR (You Only Transform One Representation), a novel deep learning model for object detection that combines Swin Transformers and YoloR architectures. Transformers, a revolutionary technology in natural language processing, have also significantly impacted computer vision, offering the potential to enhance accuracy and computational efficiency. YotoR combines the robust Swin Transformer backbone with the YoloR neck and head. In our experiments, YotoR models TP5 and BP4 consistently outperform YoloR P6 and Swin Transformers in various evaluations, delivering improved object detection performance and faster inference speeds than Swin Transformer models. These results highlight the potential for further model combinations and improvements in real-time object detection with Transformers. The paper concludes by emphasizing the broader implications of YotoR, including its potential to enhance transformer-based models for image-related tasks.
A Survey on Deep Learning Methods for Robot Vision
Mar 28, 2018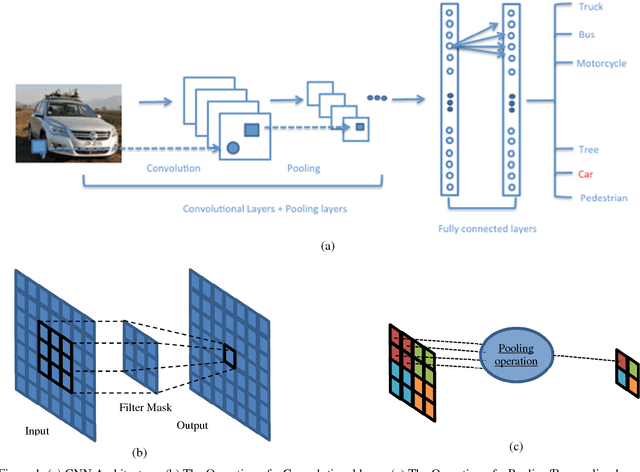

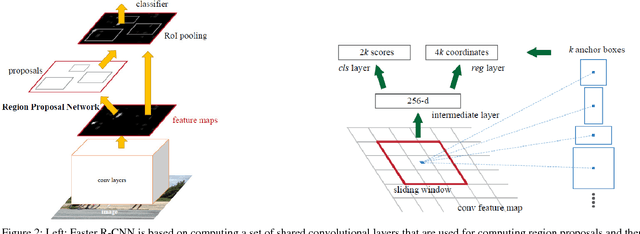

Deep learning has allowed a paradigm shift in pattern recognition, from using hand-crafted features together with statistical classifiers to using general-purpose learning procedures for learning data-driven representations, features, and classifiers together. The application of this new paradigm has been particularly successful in computer vision, in which the development of deep learning methods for vision applications has become a hot research topic. Given that deep learning has already attracted the attention of the robot vision community, the main purpose of this survey is to address the use of deep learning in robot vision. To achieve this, a comprehensive overview of deep learning and its usage in computer vision is given, that includes a description of the most frequently used neural models and their main application areas. Then, the standard methodology and tools used for designing deep-learning based vision systems are presented. Afterwards, a review of the principal work using deep learning in robot vision is presented, as well as current and future trends related to the use of deep learning in robotics. This survey is intended to be a guide for the developers of robot vision systems.