 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust 3D face recognition in presence of pose and partial occlusions or missing parts
Aug 16, 2014


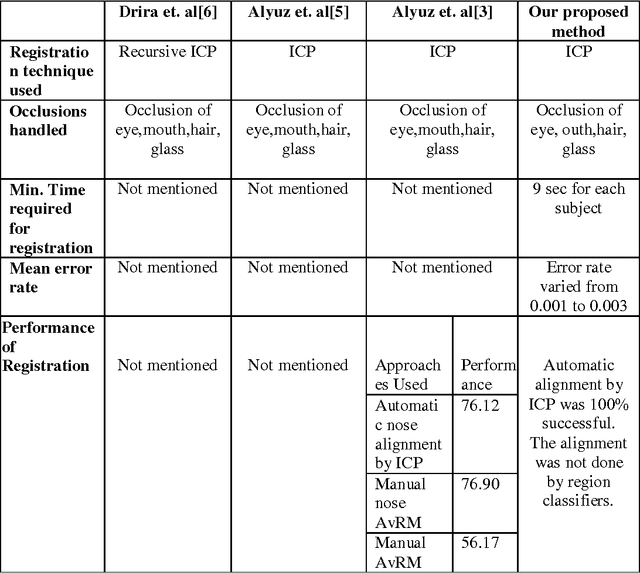
In this paper, we propose a robust 3D face recognition system which can handle pose as well as occlusions in real world. The system at first takes as input, a 3D range image, simultaneously registers it using ICP(Iterative Closest Point) algorithm. ICP used in this work, registers facial surfaces to a common model by minimizing distances between a probe model and a gallery model. However the performance of ICP relies heavily on the initial conditions. Hence, it is necessary to provide an initial registration, which will be improved iteratively and finally converge to the best alignment possible. Once the faces are registered, the occlusions are automatically extracted by thresholding the depth map values of the 3D image. After the occluded regions are detected, restoration is done by Principal Component Analysis (PCA). The restored images, after the removal of occlusions, are then fed to the recognition system for classification purpose. Features are extracted from the reconstructed non-occluded face images in the form of face normals. The experimental results which were obtained on the occluded facial images from the Bosphorus 3D face database, illustrate that our occlusion compensation scheme has attained a recognition accuracy of 91.30%.
A novel approach to nose-tip and eye corners detection using H-K Curvature Analysis in case of 3D images
Sep 18, 2013
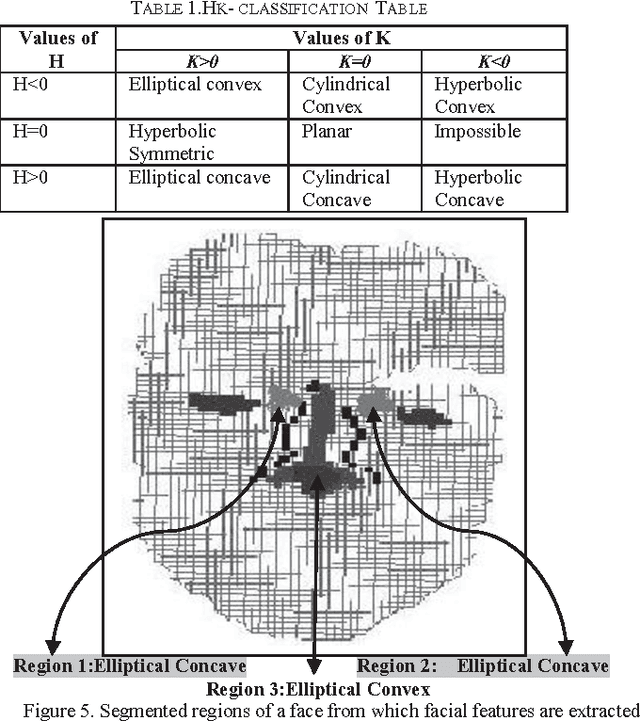
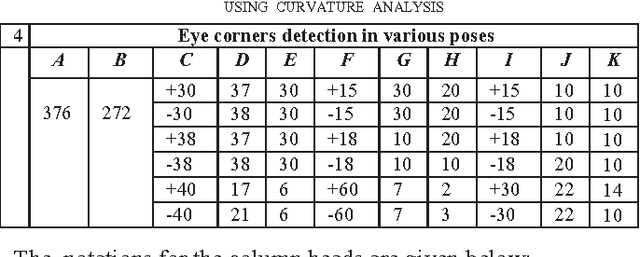
In this paper we present a novel method that combines a HK curvature-based approach for three-dimensional (3D) face detection in different poses (X-axis, Y-axis and Z-axis). Salient face features, such as the eyes and nose, are detected through an analysis of the curvature of the entire facial surface. All the experiments have been performed on the FRAV3D Database. After applying the proposed algorithm to the 3D facial surface we have obtained considerably good results i.e. on 752 3D face images our method detected the eye corners for 543 face images, thus giving a 72.20% of eye corners detection and 743 face images for nose-tip detection thus giving a 98.80% of good nose tip localization
Detection of pose orientation across single and multiple axes in case of 3D face images
Sep 18, 2013
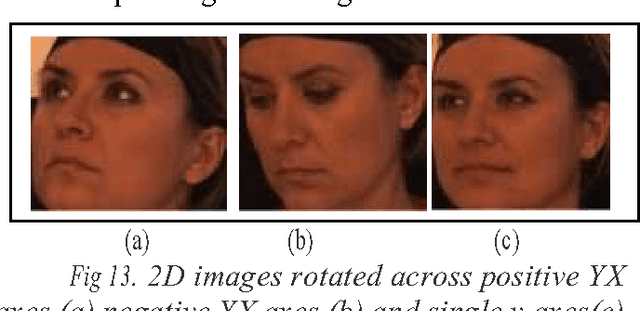

In this paper, we propose a new approach that takes as input a 3D face image across X, Y and Z axes as well as both Y and X axes and gives output as its pose i.e. it tells whether the face is oriented with respect the X, Y or Z axes or is it oriented across multiple axes with angles of rotation up to 42 degree. All the experiments have been performed on the FRAV3D, GAVADB and Bosphorus database which has two figures of each individual across multiple axes. After applying the proposed algorithm to the 3D facial surface from FRAV3D on 848 3D faces, 566 3D faces were correctly recognized for pose thus giving 67% of correct identification rate. We had experimented on 420 images from the GAVADB database, and only 336 images were detected for correct pose identification rate i.e. 80% and from Bosphorus database on 560 images only 448 images were detected for correct pose identification i.e. 80%.abstract goes here.
A novel approach for nose tip detection using smoothing by weighted median filtering applied to 3D face images in variant poses
Sep 18, 2013
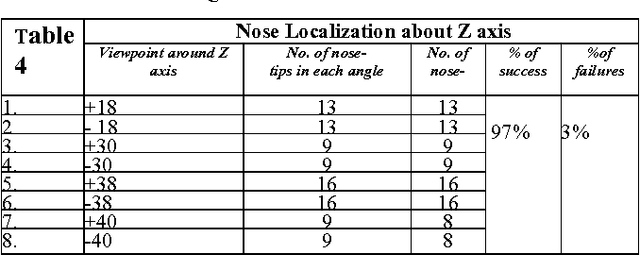
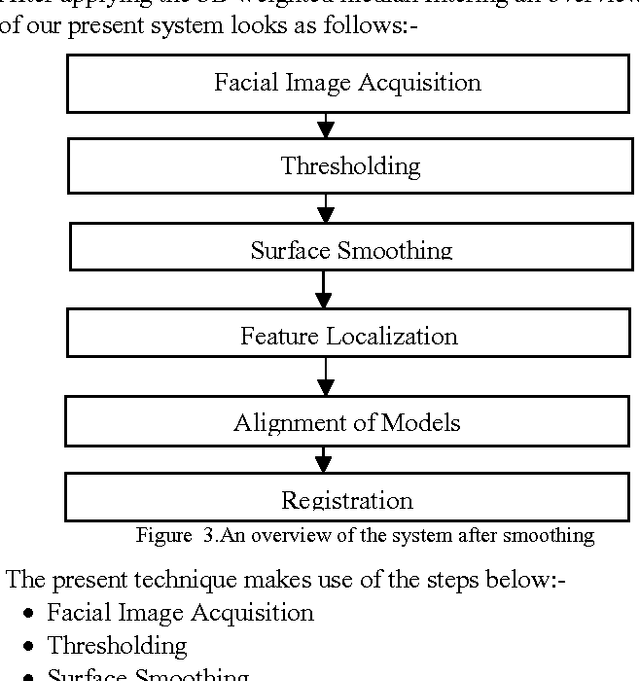

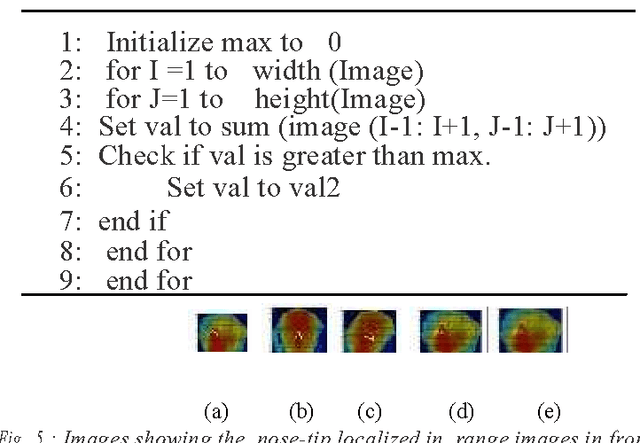
This paper is based on an application of smoothing of 3D face images followed by feature detection i.e. detecting the nose tip. The present method uses a weighted mesh median filtering technique for smoothing. In this present smoothing technique we have built the neighborhood surrounding a particular point in 3D face and replaced that with the weighted value of the surrounding points in 3D face image. After applying the smoothing technique to the 3D face images our experimental results show that we have obtained considerable improvement as compared to the algorithm without smoothing. We have used here the maximum intensity algorithm for detecting the nose-tip and this method correctly detects the nose-tip in case of any pose i.e. along X, Y, and Z axes. The present technique gave us worked successfully on 535 out of 542 3D face images as compared to the method without smoothing which worked only on 521 3D face images out of 542 face images. Thus we have obtained a 98.70% performance rate over 96.12% performance rate of the algorithm without smoothing. All the experiments have been performed on the FRAV3D database.
A method for nose-tip based 3D face registration using maximum intensity algorithm
Sep 13, 2013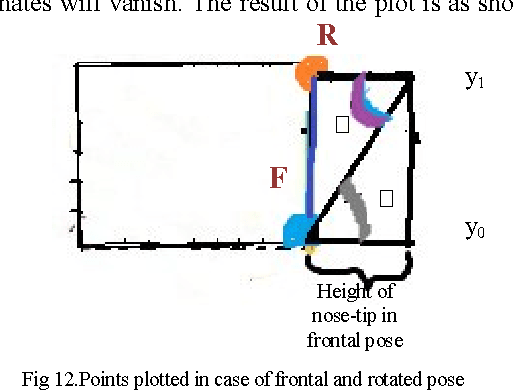


In this paper we present a novel technique of registering 3D images across pose. In this context, we have taken into account the images which are aligned across X, Y and Z axes. We have first determined the angle across which the image is rotated with respect to X, Y and Z axes and then translation is performed on the images. After testing the proposed method on 472 images from the FRAV3D database, the method correctly registers 358 images thus giving a performance rate of 75.84%.
A Novel Approach in detecting pose orientation of a 3D face required for face
Sep 13, 2013
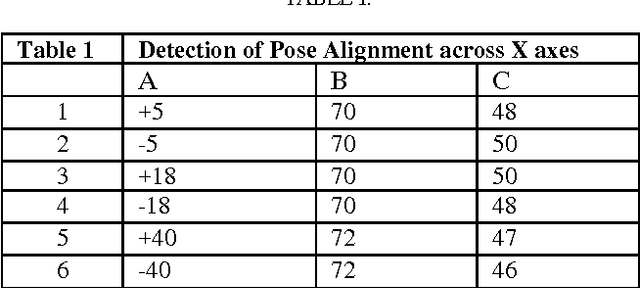


In this paper we present a novel approach that takes as input a 3D image and gives as output its pose i.e. it tells whether the face is oriented with respect the X, Y or Z axes with angles of rotation up to 40 degree. All the experiments have been performed on the FRAV3D Database. After applying the proposed algorithm to the 3D facial surface we have obtained i.e. on 848 3D face images our method detected the pose correctly for 566 face images,thus giving an approximately 67 % of correct pose detection.