 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Neural Sparse Linear Solvers
Mar 14, 2022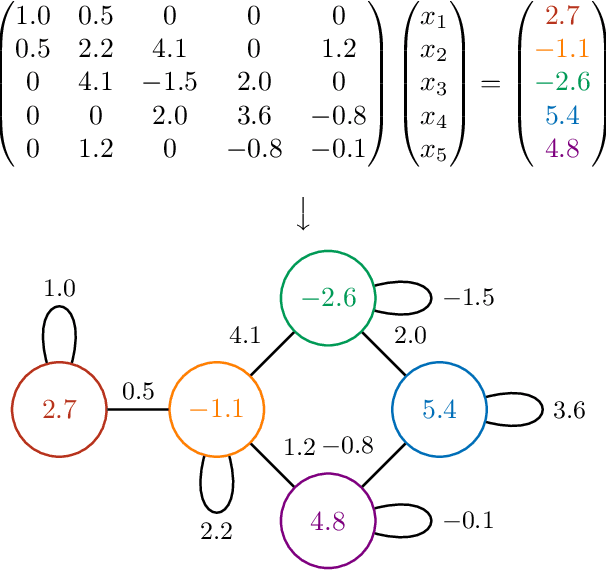

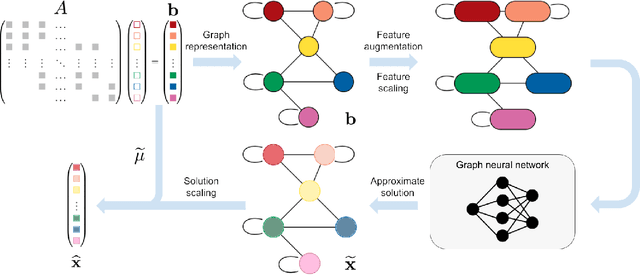

Large sparse symmetric linear systems appear in several branches of science and engineering thanks to the widespread use of the finite element method (FEM). The fastest sparse linear solvers available implement hybrid iterative methods. These methods are based on heuristic algorithms to permute rows and columns or find a preconditioner matrix. In addition, they are inherently sequential, making them unable to leverage the GPU processing power entirely. We propose neural sparse linear solvers, a deep learning framework to learn approximate solvers for sparse symmetric linear systems. Our method relies on representing a sparse symmetric linear system as an undirected weighted graph. Such graph representation is inherently permutation-equivariant and scale-invariant, and it can become the input to a graph neural network trained to regress the solution. We test neural sparse linear solvers on static linear analysis problems from structural engineering. Our method is less accurate than classic algorithms, but it is hardware-independent, fast on GPUs, and applicable to generic sparse symmetric systems without any additional hypothesis. Although many limitations remain, this study shows a general approach to tackle problems involving sparse symmetric matrices using graph neural networks.
Learning to Grasp from 2.5D images: a Deep Reinforcement Learning Approach
Aug 08, 2019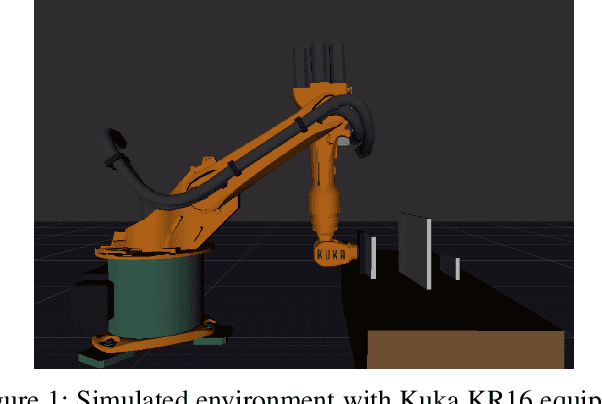
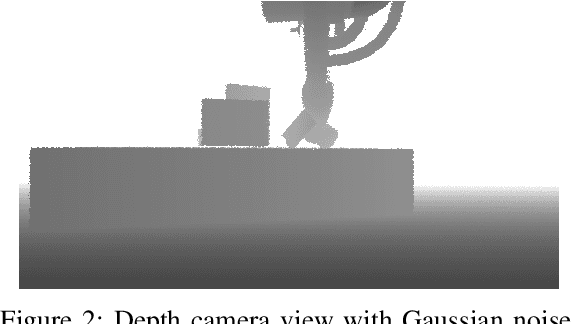
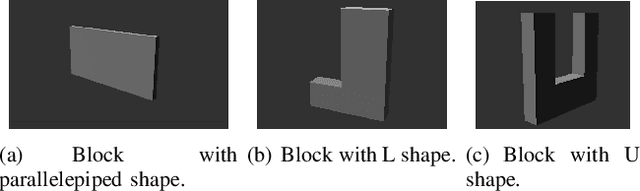

In this paper, we propose a deep reinforcement learning (DRL) solution to the grasping problem using 2.5D images as the only source of information. In particular, we developed a simulated environment where a robot equipped with a vacuum gripper has the aim of reaching blocks with planar surfaces. These blocks can have different dimensions, shapes, position and orientation. Unity 3D allowed us to simulate a real-world setup, where a depth camera is placed in a fixed position and the stream of images is used by our policy network to learn how to solve the task. We explored different DRL algorithms and problem configurations. The experiments demonstrated the effectiveness of the proposed DRL algorithm applied to grasp tasks guided by visual depth camera inputs. When using the proper policy, the proposed method estimates a robot tool configuration that reaches the object surface with negligible position and orientation errors. This is, to the best of our knowledge, the first successful attempt of using 2.5D images only as of the input of a DRL algorithm, to solve the grasping problem regressing 3D world coordinates.
Adversarial Pixel-Level Generation of Semantic Images
Jun 27, 2019



Generative Adversarial Networks (GANs) have obtained extraordinary success in the generation of realistic images, a domain where a lower pixel-level accuracy is acceptable. We study the problem, not yet tackled in the literature, of generating semantic images starting from a prior distribution. Intuitively this problem can be approached using standard methods and architectures. However, a better-suited approach is needed to avoid generating blurry, hallucinated and thus unusable images since tasks like semantic segmentation require pixel-level exactness. In this work, we present a novel architecture for learning to generate pixel-level accurate semantic images, namely Semantic Generative Adversarial Networks (SemGANs). The experimental evaluation shows that our architecture outperforms standard ones from both a quantitative and a qualitative point of view in many semantic image generation tasks.
A Survey on GANs for Anomaly Detection
Jun 27, 2019



Anomaly detection is a significant problem faced in several research areas. Detecting and correctly classifying something unseen as anomalous is a challenging problem that has been tackled in many different manners over the years. Generative Adversarial Networks (GANs) and the adversarial training process have been recently employed to face this task yielding remarkable results. In this paper we survey the principal GAN-based anomaly detection methods, highlighting their pros and cons. Our contributions are the empirical validation of the main GAN models for anomaly detection, the increase of the experimental results on different datasets and the public release of a complete Open Source toolbox for Anomaly Detection using GANs.