 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredicting Next Local Appearance for Video Anomaly Detection
Jun 10, 2021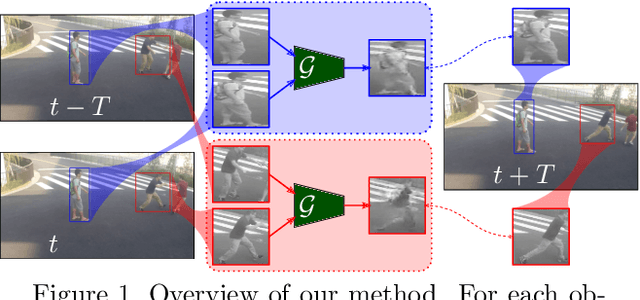
We present a local anomaly detection method in videos. As opposed to most existing methods that are computationally expensive and are not very generalizable across different video scenes, we propose an adversarial framework that learns the temporal local appearance variations by predicting the appearance of a normally behaving object in the next frame of a scene by only relying on its current and past appearances. In the presence of an abnormally behaving object, the reconstruction error between the real and the predicted next appearance of that object indicates the likelihood of an anomaly. Our method is competitive with the existing state-of-the-art while being significantly faster for both training and inference and being better at generalizing to unseen video scenes.
Local Anomaly Detection in Videos using Object-Centric Adversarial Learning
Nov 13, 2020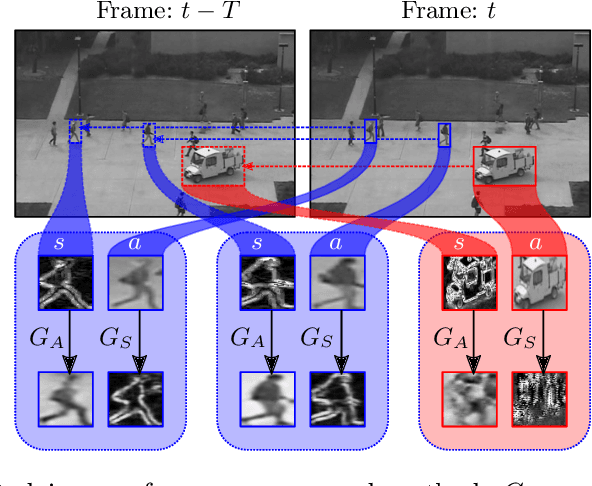
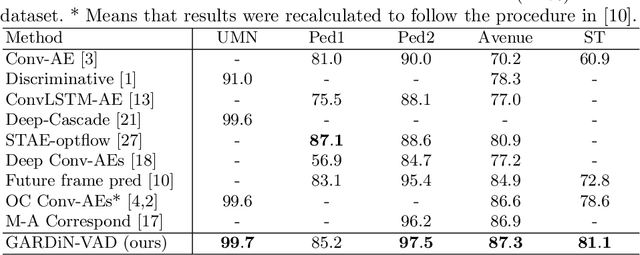
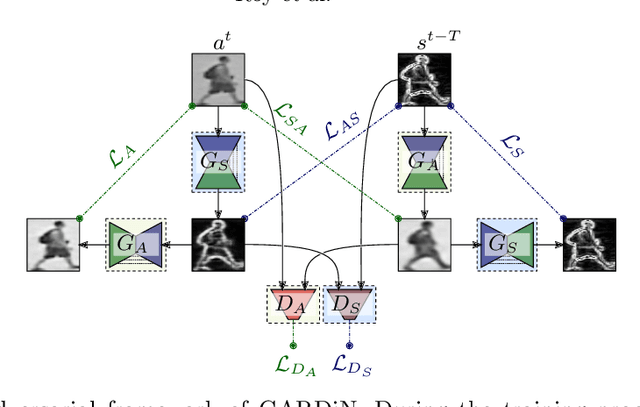
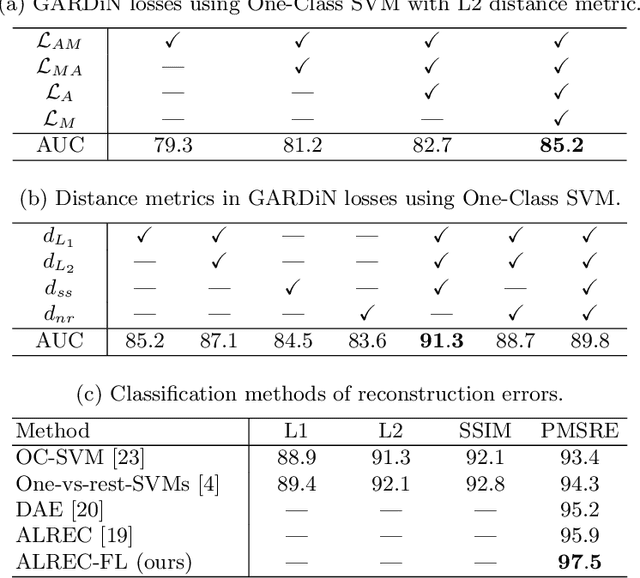
We propose a novel unsupervised approach based on a two-stage object-centric adversarial framework that only needs object regions for detecting frame-level local anomalies in videos. The first stage consists in learning the correspondence between the current appearance and past gradient images of objects in scenes deemed normal, allowing us to either generate the past gradient from current appearance or the reverse. The second stage extracts the partial reconstruction errors between real and generated images (appearance and past gradient) with normal object behaviour, and trains a discriminator in an adversarial fashion. In inference mode, we employ the trained image generators with the adversarially learned binary classifier for outputting region-level anomaly detection scores. We tested our method on four public benchmarks, UMN, UCSD, Avenue and ShanghaiTech and our proposed object-centric adversarial approach yields competitive or even superior results compared to state-of-the-art methods.
Adversarially Learned Abnormal Trajectory Classifier
Apr 03, 2019


We address the problem of abnormal event detection from trajectory data. In this paper, a new adversarial approach is proposed for building a deep neural network binary classifier, trained in an unsupervised fashion, that can distinguish normal from abnormal trajectory-based events without the need for setting manual detection threshold. Inspired by the generative adversarial network (GAN) framework, our GAN version is a discriminative one in which the discriminator is trained to distinguish normal and abnormal trajectory reconstruction errors given by a deep autoencoder. With urban traffic videos and their associated trajectories, our proposed method gives the best accuracy for abnormal trajectory detection. In addition, our model can easily be generalized for abnormal trajectory-based event detection and can still yield the best behavioural detection results as demonstrated on the CAVIAR dataset.
Road User Abnormal Trajectory Detection using a Deep Autoencoder
Aug 25, 2018



In this paper, we focus on the development of a method that detects abnormal trajectories of road users at traffic intersections. The main difficulty with this is the fact that there are very few abnormal data and the normal ones are insufficient for the training of any kinds of machine learning model. To tackle these problems, we proposed the solution of using a deep autoencoder network trained solely through augmented data considered as normal. By generating artificial abnormal trajectories, our method is tested on four different outdoor urban users scenes and performs better compared to some classical outlier detection methods.