 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSupporting Cross-language Cross-project Bug Localization Using Pre-trained Language Models
Jul 03, 2024Automatically locating a bug within a large codebase remains a significant challenge for developers. Existing techniques often struggle with generalizability and deployment due to their reliance on application-specific data and large model sizes. This paper proposes a novel pre-trained language model (PLM) based technique for bug localization that transcends project and language boundaries. Our approach leverages contrastive learning to enhance the representation of bug reports and source code. It then utilizes a novel ranking approach that combines commit messages and code segments. Additionally, we introduce a knowledge distillation technique that reduces model size for practical deployment without compromising performance. This paper presents several key benefits. By incorporating code segment and commit message analysis alongside traditional file-level examination, our technique achieves better bug localization accuracy. Furthermore, our model excels at generalizability - trained on code from various projects and languages, it can effectively identify bugs in unseen codebases. To address computational limitations, we propose a CPU-compatible solution. In essence, proposed work presents a highly effective, generalizable, and efficient bug localization technique with the potential to real-world deployment.
A Framework for Analysing Driver Interactions with Semi-Autonomous Vehicles
Jan 01, 2013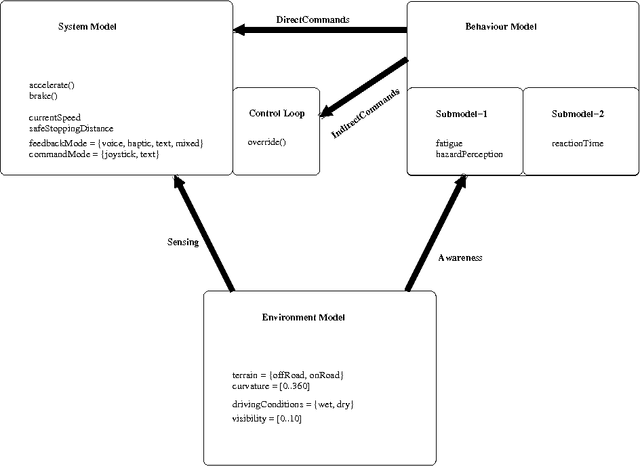
Semi-autonomous vehicles are increasingly serving critical functions in various settings from mining to logistics to defence. A key characteristic of such systems is the presence of the human (drivers) in the control loop. To ensure safety, both the driver needs to be aware of the autonomous aspects of the vehicle and the automated features of the vehicle built to enable safer control. In this paper we propose a framework to combine empirical models describing human behaviour with the environment and system models. We then analyse, via model checking, interaction between the models for desired safety properties. The aim is to analyse the design for safe vehicle-driver interaction. We demonstrate the applicability of our approach using a case study involving semi-autonomous vehicles where the driver fatigue are factors critical to a safe journey.
* In Proceedings FTSCS 2012, arXiv:1212.6574