Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Maximally Predictive Prototypes in Multiple Instance Learning
Oct 02, 2019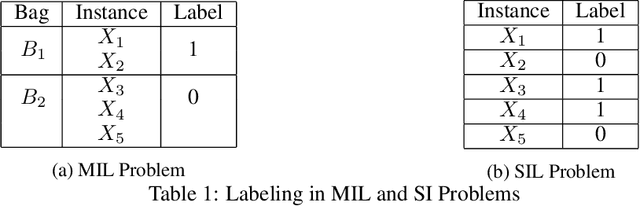
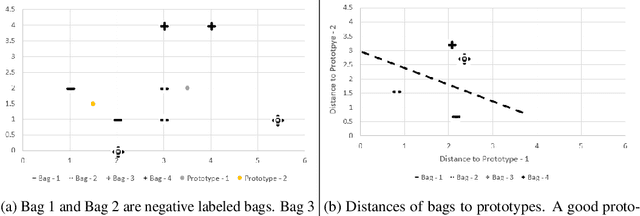
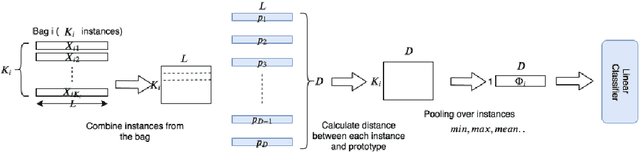

In this work, we propose a simple model that provides permutation invariant maximally predictive prototype generator from a given dataset, which leads to interpretability of the solution and concrete insights to the nature and the solution of a problem. Our aim is to find out prototypes in the feature space to map the collection of instances (i.e. bags) to a distance feature space and simultaneously learn a linear classifier for multiple instance learning (MIL). Our experiments on classical MIL benchmark datasets demonstrate that proposed framework is an accurate and efficient classifier compared to the existing approaches.
* Sets & Partitions Workshop at NeurIPS 2019
Via