 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbing Embodied LLMs: When Higher Observation Fidelity Hurts Problem Solving
May 19, 2026Large Language Models are increasingly proposed as cognitive components for robotic systems, yet their opaque decision processes make it difficult to explain success or failure in closed-loop embodied tasks. Following an empirical AI methodology, we study embodied LLM agents behaviorally by varying the information available to the agent and measuring the resulting changes in behavior. Using the Lockbox, a sequential mechanical puzzle with hidden interdependencies, we evaluate LLMs across RGB, RGB-D, and ground-truth symbolic observations in a physical robotic setup and use controlled simulation to probe the resulting behavior. Counterintuitively, agents perform best under raw RGB input and worst under perfect ground-truth observations. In simulation, we probe this effect by randomly flipping perceived action outcomes and find that moderate noise improves performance, peaking at a 40% flip probability with a 2.85-fold success rate increase over the noise-free baseline. Further analysis links this gain to a reduction in repetitive action loops. These findings suggest that success rates alone are insufficient for evaluating LLMs, as measured performance may reflect the interaction between perceptual errors and reasoning failures rather than robust problem solving.
A Biologically Inspired Design Principle for Building Robust Robotic Systems
Aug 19, 2024Robustness, the ability of a system to maintain performance under significant and unanticipated environmental changes, is a critical property for robotic systems. While biological systems naturally exhibit robustness, there is no comprehensive understanding of how to achieve similar robustness in robotic systems. In this work, we draw inspirations from biological systems and propose a design principle that advocates active interconnections among system components to enhance robustness to environmental variations. We evaluate this design principle in a challenging long-horizon manipulation task: solving lockboxes. Our extensive simulated and real-world experiments demonstrate that we could enhance robustness against environmental changes by establishing active interconnections among system components without substantial changes in individual components. Our findings suggest that a systematic investigation of design principles in system building is necessary. It also advocates for interdisciplinary collaborations to explore and evaluate additional principles of biological robustness to advance the development of intelligent and adaptable robotic systems.
Hierarchical Policy Learning for Mechanical Search
Feb 28, 2022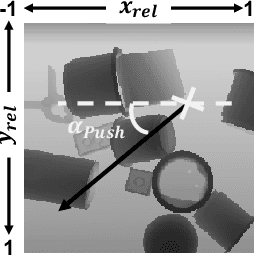
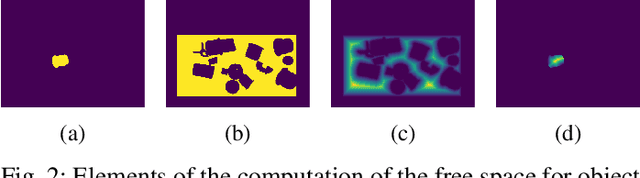
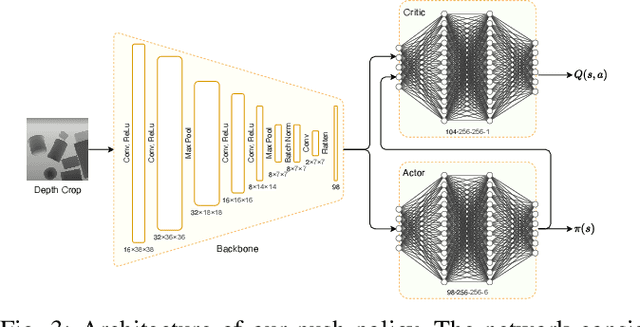
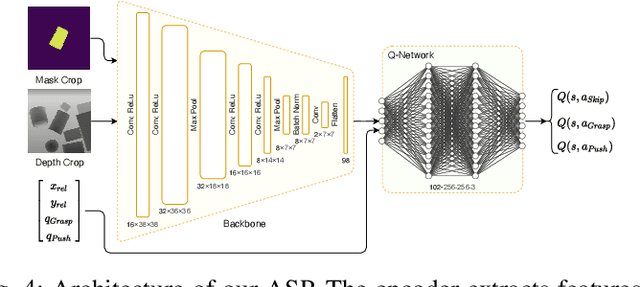
Retrieving objects from clutters is a complex task, which requires multiple interactions with the environment until the target object can be extracted. These interactions involve executing action primitives like grasping or pushing as well as setting priorities for the objects to manipulate and the actions to execute. Mechanical Search (MS) is a framework for object retrieval, which uses a heuristic algorithm for pushing and rule-based algorithms for high-level planning. While rule-based policies profit from human intuition in how they work, they usually perform sub-optimally in many cases. Deep reinforcement learning (RL) has shown great performance in complex tasks such as taking decisions through evaluating pixels, which makes it suitable for training policies in the context of object-retrieval. In this work, we first formulate the MS problem in a principled formulation as a hierarchical POMDP. Based on this formulation, we propose a hierarchical policy learning approach for the MS problem. For demonstration, we present two main parameterized sub-policies: a push policy and an action selection policy. When integrated into the hierarchical POMDP's policy, our proposed sub-policies increase the success rate of retrieving the target object from less than 32% to nearly 80%, while reducing the computation time for push actions from multiple seconds to less than 10 milliseconds.