 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSeq-DeepIPC: Sequential Sensing for End-to-End Control in Legged Robot Navigation
Oct 27, 2025We present Seq-DeepIPC, a sequential end-to-end perception-to-control model for legged robot navigation in realworld environments. Seq-DeepIPC advances intelligent sensing for autonomous legged navigation by tightly integrating multi-modal perception (RGB-D + GNSS) with temporal fusion and control. The model jointly predicts semantic segmentation and depth estimation, giving richer spatial features for planning and control. For efficient deployment on edge devices, we use EfficientNet-B0 as the encoder, reducing computation while maintaining accuracy. Heading estimation is simplified by removing the noisy IMU and instead computing the bearing angle directly from consecutive GNSS positions. We collected a larger and more diverse dataset that includes both road and grass terrains, and validated Seq-DeepIPC on a robot dog. Comparative and ablation studies show that sequential inputs improve perception and control in our models, while other baselines do not benefit. Seq-DeepIPC achieves competitive or better results with reasonable model size; although GNSS-only heading is less reliable near tall buildings, it is robust in open areas. Overall, Seq-DeepIPC extends end-to-end navigation beyond wheeled robots to more versatile and temporally-aware systems. To support future research, we will release the codes to our GitHub repository at https://github.com/oskarnatan/Seq-DeepIPC.
SKGE-SWIN: End-To-End Autonomous Vehicle Waypoint Prediction and Navigation Using Skip Stage Swin Transformer
Aug 28, 2025Focusing on the development of an end-to-end autonomous vehicle model with pixel-to-pixel context awareness, this research proposes the SKGE-Swin architecture. This architecture utilizes the Swin Transformer with a skip-stage mechanism to broaden feature representation globally and at various network levels. This approach enables the model to extract information from distant pixels by leveraging the Swin Transformer's Shifted Window-based Multi-head Self-Attention (SW-MSA) mechanism and to retain critical information from the initial to the final stages of feature extraction, thereby enhancing its capability to comprehend complex patterns in the vehicle's surroundings. The model is evaluated on the CARLA platform using adversarial scenarios to simulate real-world conditions. Experimental results demonstrate that the SKGE-Swin architecture achieves a superior Driving Score compared to previous methods. Furthermore, an ablation study will be conducted to evaluate the contribution of each architectural component, including the influence of skip connections and the use of the Swin Transformer, in improving model performance.
ESDS: AI-Powered Early Stunting Detection and Monitoring System using Edited Radius-SMOTE Algorithm
Sep 21, 2024



Stunting detection is a significant issue in Indonesian healthcare, causing lower cognitive function, lower productivity, a weakened immunity, delayed neuro-development, and degenerative diseases. In regions with a high prevalence of stunting and limited welfare resources, identifying children in need of treatment is critical. The diagnostic process often raises challenges, such as the lack of experience in medical workers, incompatible anthropometric equipment, and inefficient medical bureaucracy. To counteract the issues, the use of load cell sensor and ultrasonic sensor can provide suitable anthropometric equipment and streamline the medical bureaucracy for stunting detection. This paper also employs machine learning for stunting detection based on sensor readings. The experiment results show that the sensitivity of the load cell sensor and the ultrasonic sensor is 0.9919 and 0.9986, respectively. Also, the machine learning test results have three classification classes, which are normal, stunted, and stunting with an accuracy rate of 98\%.
DeepIPCv2: LiDAR-powered Robust Environmental Perception and Navigational Control for Autonomous Vehicle
Jul 31, 2023



We present DeepIPCv2, an autonomous driving model that perceives the environment using a LiDAR sensor for more robust drivability, especially when driving under poor illumination conditions where everything is not clearly visible. DeepIPCv2 takes a set of LiDAR point clouds as the main perception input. Since point clouds are not affected by illumination changes, they can provide a clear observation of the surroundings no matter what the condition is. This results in a better scene understanding and stable features provided by the perception module to support the controller module in estimating navigational control properly. To evaluate its performance, we conduct several tests by deploying the model to predict a set of driving records and perform real automated driving under three different conditions. We also conduct ablation and comparative studies with some recent models to justify its performance. Based on the experimental results, DeepIPCv2 shows a robust performance by achieving the best drivability in all driving scenarios. Furthermore, we will upload the codes to https://github.com/oskarnatan/DeepIPCv2.
DeepIPC: Deeply Integrated Perception and Control for Mobile Robot in Real Environments
Aug 02, 2022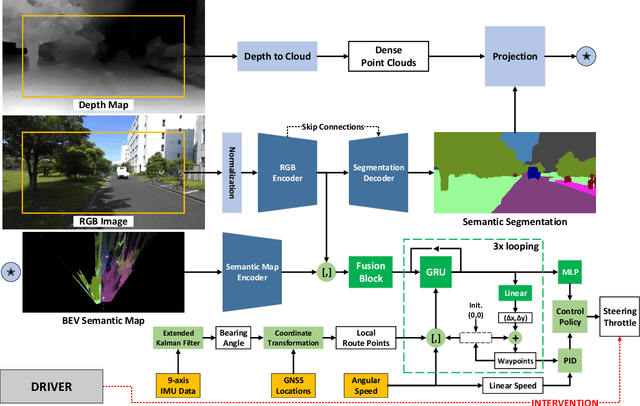

We propose DeepIPC, an end-to-end multi-task model that handles both perception and control tasks in driving a mobile robot autonomously. The model consists of two main parts, perception and controller modules. The perception module takes RGB image and depth map to perform semantic segmentation and bird's eye view (BEV) semantic mapping along with providing their encoded features. Meanwhile, the controller module processes these features with the measurement of GNSS locations and angular speed to estimate waypoints that come with latent features. Then, two different agents are used to translate waypoints and latent features into a set of navigational controls to drive the robot. The model is evaluated by predicting driving records and performing automated driving under various conditions in the real environment. Based on the experimental results, DeepIPC achieves the best drivability and multi-task performance even with fewer parameters compared to the other models.
Fully End-to-end Autonomous Driving with Semantic Depth Cloud Mapping and Multi-Agent
Apr 12, 2022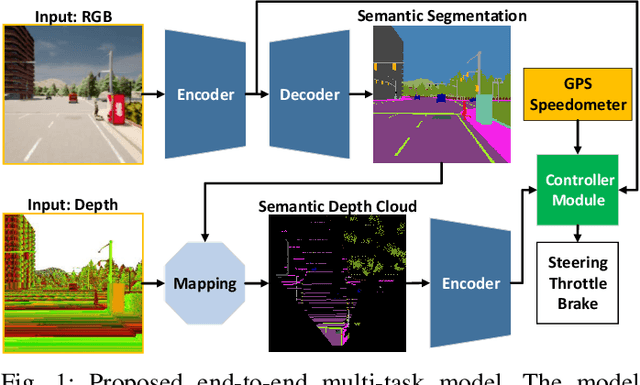
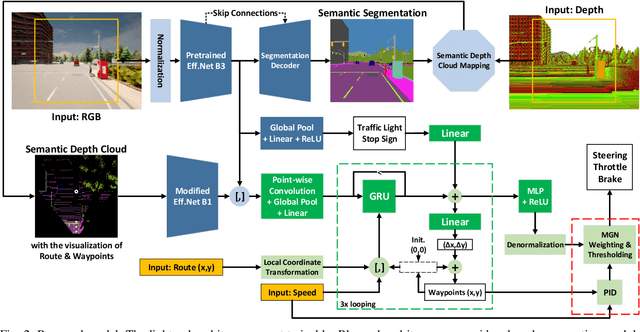
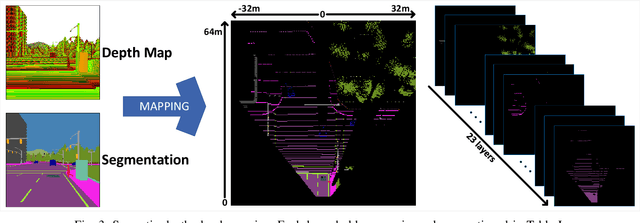
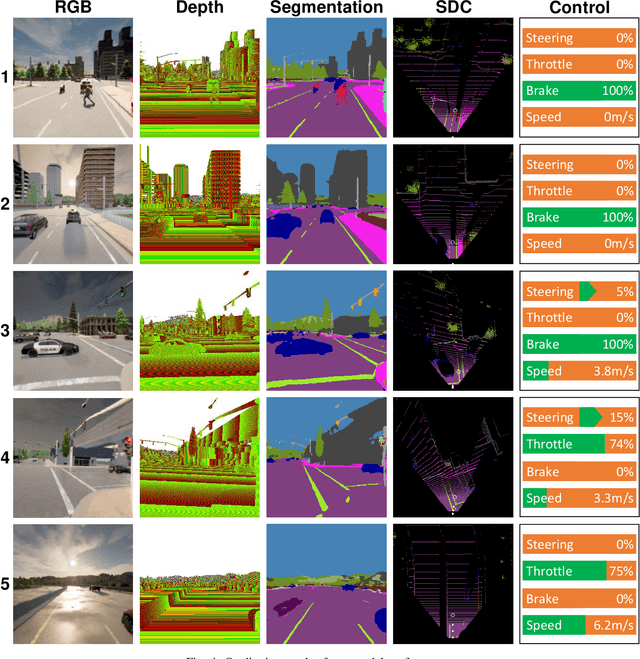
Focusing on the task of point-to-point navigation for an autonomous driving vehicle, we propose a novel deep learning model trained with end-to-end and multi-task learning manners to perform both perception and control tasks simultaneously. The model is used to drive the ego vehicle safely by following a sequence of routes defined by the global planner. The perception part of the model is used to encode high-dimensional observation data provided by an RGBD camera while performing semantic segmentation, semantic depth cloud (SDC) mapping, and traffic light state and stop sign prediction. Then, the control part decodes the encoded features along with additional information provided by GPS and speedometer to predict waypoints that come with a latent feature space. Furthermore, two agents are employed to process these outputs and make a control policy that determines the level of steering, throttle, and brake as the final action. The model is evaluated on CARLA simulator with various scenarios made of normal-adversarial situations and different weathers to mimic real-world conditions. In addition, we do a comparative study with some recent models to justify the performance in multiple aspects of driving. Moreover, we also conduct an ablation study on SDC mapping and multi-agent to understand their roles and behavior. As a result, our model achieves the highest driving score even with fewer parameters and computation load. To support future studies, we share our codes at https://github.com/oskarnatan/end-to-end-driving.