 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust and Noise-resilient Long-Term Prediction of Spatiotemporal Data Using Variational Mode Graph Neural Networks with 3D Attention
Apr 09, 2025This paper focuses on improving the robustness of spatiotemporal long-term prediction using a variational mode graph convolutional network (VMGCN) by introducing 3D channel attention. The deep learning network for this task relies on historical data inputs, yet real-time data can be corrupted by sensor noise, altering its distribution. We model this noise as independent and identically distributed (i.i.d.) Gaussian noise and incorporate it into the LargeST traffic volume dataset, resulting in data with both inherent and additive noise components. Our approach involves decomposing the corrupted signal into modes using variational mode decomposition, followed by feeding the data into a learning pipeline for prediction. We integrate a 3D attention mechanism encompassing spatial, temporal, and channel attention. The spatial and temporal attention modules learn their respective correlations, while the channel attention mechanism is used to suppress noise and highlight the significant modes in the spatiotemporal signals. Additionally, a learnable soft thresholding method is implemented to exclude unimportant modes from the feature vector, and a feature reduction method based on the signal-to-noise ratio (SNR) is applied. We compare the performance of our approach against baseline models, demonstrating that our method achieves superior long-term prediction accuracy, robustness to noise, and improved performance with mode truncation compared to the baseline models. The code of the paper is available at https://github.com/OsamaAhmad369/VMGCN.
Spatiotemporal Air Quality Mapping in Urban Areas Using Sparse Sensor Data, Satellite Imagery, Meteorological Factors, and Spatial Features
Jan 20, 2025Monitoring air pollution is crucial for protecting human health from exposure to harmful substances. Traditional methods of air quality monitoring, such as ground-based sensors and satellite-based remote sensing, face limitations due to high deployment costs, sparse sensor coverage, and environmental interferences. To address these challenges, this paper proposes a framework for high-resolution spatiotemporal Air Quality Index (AQI) mapping using sparse sensor data, satellite imagery, and various spatiotemporal factors. By leveraging Graph Neural Networks (GNNs), we estimate AQI values at unmonitored locations based on both spatial and temporal dependencies. The framework incorporates a wide range of environmental features, including meteorological data, road networks, points of interest (PoIs), population density, and urban green spaces, which enhance prediction accuracy. We illustrate the use of our approach through a case study in Lahore, Pakistan, where multi-resolution data is used to generate the air quality index map at a fine spatiotemporal scale.
Variational Mode-Driven Graph Convolutional Network for Spatiotemporal Traffic Forecasting
Aug 29, 2024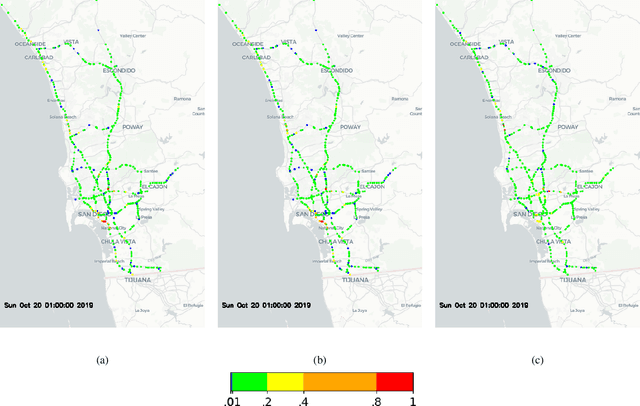



This paper focuses on spatio-temporal (ST) traffic prediction traffic using graph neural networks. Given that ST data consists of non-stationary and complex time events, interpreting and predicting such trends is comparatively complicated. Representation of ST data in modes helps us infer behavior and assess the impact of noise on prediction applications. We propose a framework that decomposes ST data into modes using the variational mode decomposition (VMD) method, which is then fed into the neural network for forecasting future states. This hybrid approach is known as a variational mode graph convolutional network (VMGCN). Instead of exhaustively searching for the number of modes, they are determined using the reconstruction loss from the real-time application data. We also study the significance of each mode and the impact of bandwidth constraints on different horizon predictions in traffic flow data. We evaluate the performance of our proposed network on the LargeST dataset for both short and long-term predictions. Our framework yields better results compared to state-of-the-art methods.
Trajectory Planning of Robotic Manipulator in Dynamic Environment Exploiting DRL
Mar 25, 2024



This study is about the implementation of a reinforcement learning algorithm in the trajectory planning of manipulators. We have a 7-DOF robotic arm to pick and place the randomly placed block at a random target point in an unknown environment. The obstacle is randomly moving which creates a hurdle in picking the object. The objective of the robot is to avoid the obstacle and pick the block with constraints to a fixed timestamp. In this literature, we have applied a deep deterministic policy gradient (DDPG) algorithm and compared the model's efficiency with dense and sparse rewards.
Learning adjacency matrix for dynamic graph neural network
Oct 04, 2023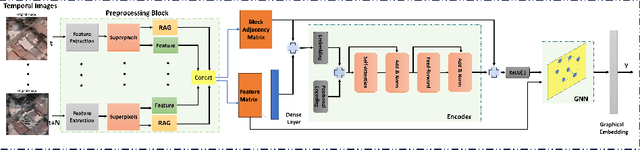
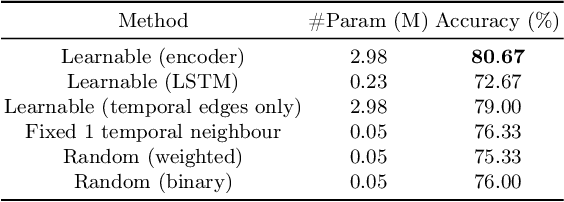
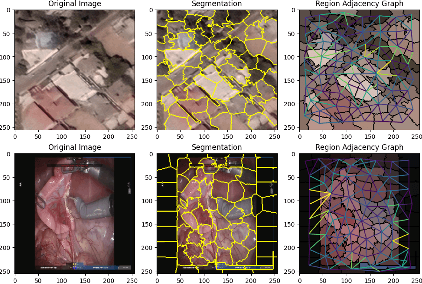
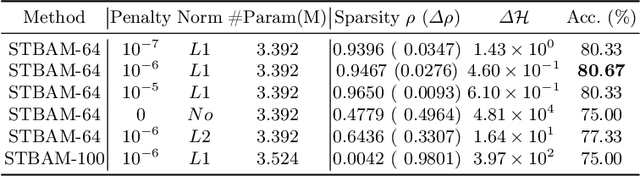
In recent work, [1] introduced the concept of using a Block Adjacency Matrix (BA) for the representation of spatio-temporal data. While their method successfully concatenated adjacency matrices to encapsulate spatio-temporal relationships in a single graph, it formed a disconnected graph. This limitation hampered the ability of Graph Convolutional Networks (GCNs) to perform message passing across nodes belonging to different time steps, as no temporal links were present. To overcome this challenge, we introduce an encoder block specifically designed to learn these missing temporal links. The encoder block processes the BA and predicts connections between previously unconnected subgraphs, resulting in a Spatio-Temporal Block Adjacency Matrix (STBAM). This enriched matrix is then fed into a Graph Neural Network (GNN) to capture the complex spatio-temporal topology of the network. Our evaluations on benchmark datasets, surgVisDom and C2D2, demonstrate that our method, with slightly higher complexity, achieves superior results compared to state-of-the-art results. Our approach's computational overhead remains significantly lower than conventional non-graph-based methodologies for spatio-temporal data.