 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-robot task allocation for safe planning under dynamic uncertainties
Mar 02, 2021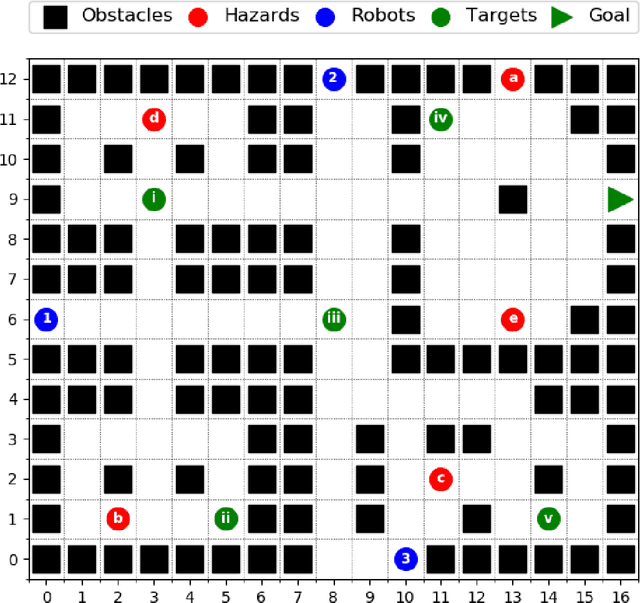
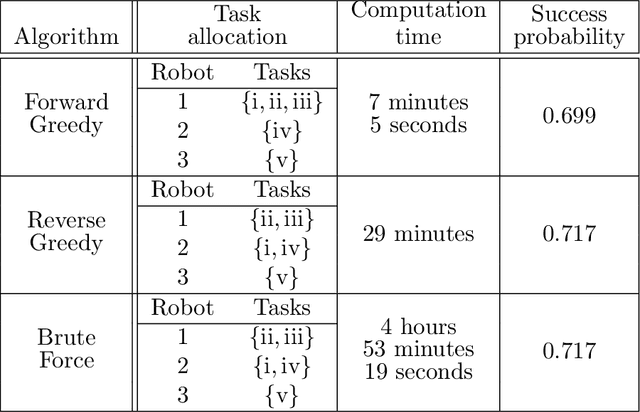
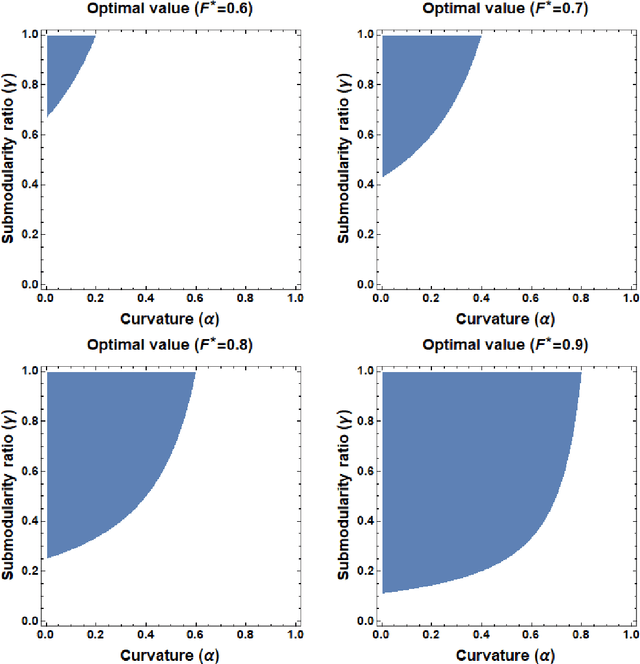
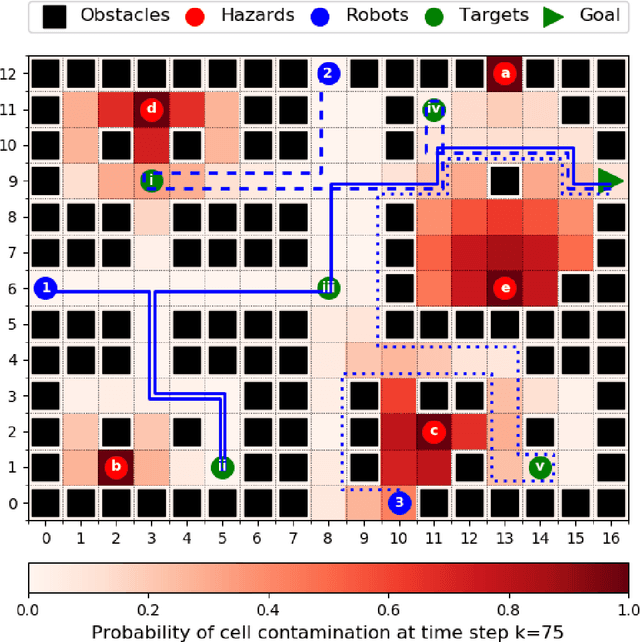
This paper considers the problem of multi-robot safe mission planning in uncertain dynamic environments. This problem arises in several applications including safety-critical exploration, surveillance, and emergency rescue missions. Computation of a multi-robot optimal control policy is challenging not only because of the complexity of incorporating dynamic uncertainties while planning, but also because of the exponential growth in problem size as a function of the number of robots. Leveraging recent works obtaining a tractable safety maximizing plan for a single robot, we propose a scalable two-stage framework to solve the problem at hand. Specifically, the problem is split into a low-level single-agent planning problem and a high-level task allocation problem. The low-level problem uses an efficient approximation of stochastic reachability for a Markov decision process to handle the dynamic uncertainty. The task allocation, on the other hand, is solved using polynomial-time forward and reverse greedy heuristics. The safety objective of our multi-robot safe planning problem allows an implementation of the greedy heuristics through a distributed auction-based approach. Moreover, by leveraging the properties of the safety objective function, we ensure provable performance bounds on the safety of the approximate solutions proposed by these two heuristics. Our result is illustrated through case studies.