 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Agent Belief Sharing through Autonomous Hierarchical Multi-Level Clustering
Jul 21, 2021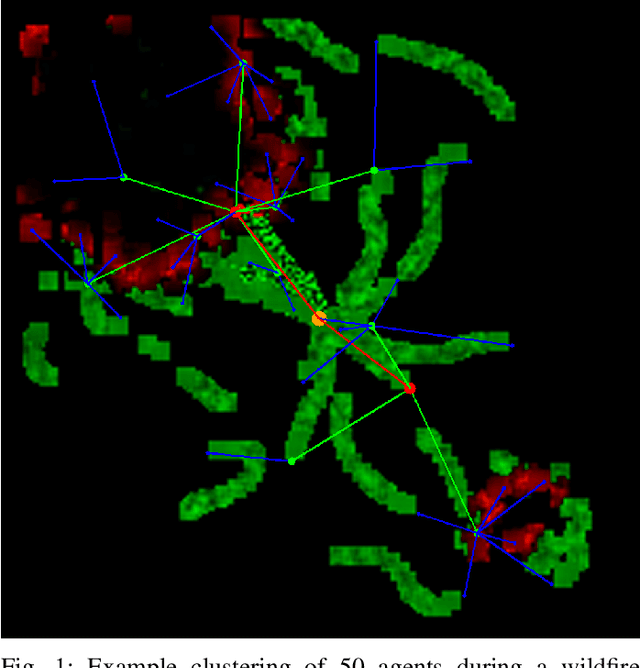

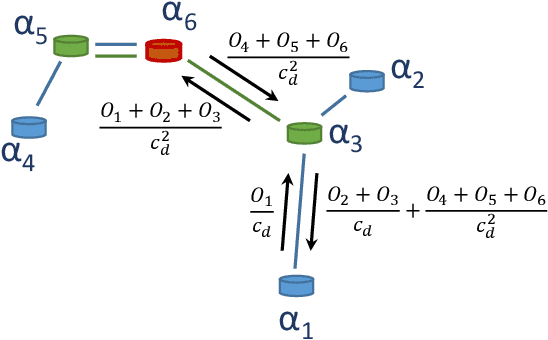
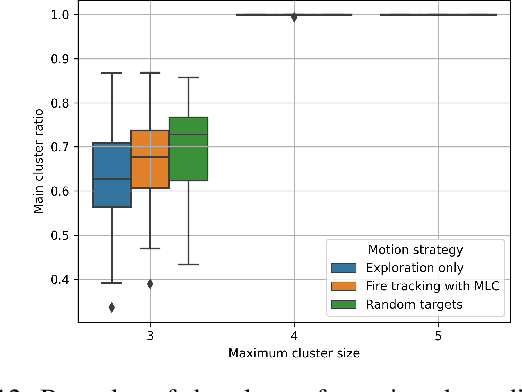
Coordination in multi-agent systems is challenging for agile robots such as unmanned aerial vehicles (UAVs), where relative agent positions frequently change due to unconstrained movement. The problem is exacerbated through the individual take-off and landing of agents for battery recharging leading to a varying number of active agents throughout the whole mission. This work proposes autonomous hierarchical multi-level clustering (MLC), which forms a clustering hierarchy utilizing decentralized methods. Through periodic cluster maintenance executed by cluster-heads, stable multi-level clustering is achieved. The resulting hierarchy is used as a backbone to solve the communication problem for locally-interactive applications such as UAV tracking problems. Using observation aggregation, compression, and dissemination, agents share local observations throughout the hierarchy, giving every agent a total system belief with spatially dependent resolution and freshness. Extensive simulations show that MLC yields a stable cluster hierarchy under different motion patterns and that the proposed belief sharing is highly applicable in wildfire front monitoring scenarios.