 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel Evaluation for Domain Identification of Unknown Classes in Open-World Recognition: A Proposal
Dec 09, 2023Open-World Recognition (OWR) is an emerging field that makes a machine learning model competent in rejecting the unknowns, managing them, and incrementally adding novel samples to the base knowledge. However, this broad objective is not practical for an agent that works on a specific task. Not all rejected samples will be used for learning continually in the future. Some novel images in the open environment may not belong to the domain of interest. Hence, identifying the unknown in the domain of interest is essential for a machine learning model to learn merely the important samples. In this study, we propose an evaluation protocol for estimating a model's capability in separating unknown in-domain (ID) and unknown out-of-domain (OOD). We evaluated using three approaches with an unknown domain and demonstrated the possibility of identifying the domain of interest using the pre-trained parameters through traditional transfer learning, Automated Machine Learning (AutoML), and Nearest Class Mean (NCM) classifier with First Integer Neighbor Clustering Hierarchy (FINCH). We experimented with five different domains: garbage, food, dogs, plants, and birds. The results show that all approaches can be used as an initial baseline yielding a good accuracy. In addition, a Balanced Accuracy (BACCU) score from a pre-trained model indicates a tendency to excel in one or more domains of interest. We observed that MobileNetV3 yielded the highest BACCU score for the garbage domain and surpassed complex models such as the transformer network. Meanwhile, our results also suggest that a strong representation in the pre-trained model is important for identifying unknown classes in the same domain. This study could open the bridge toward open-world recognition in domain-specific tasks where the relevancy of the unknown classes is vital.
Deep Reinforcement Learning-Based Mapless Crowd Navigation with Perceived Risk of the Moving Crowd for Mobile Robots
Apr 07, 2023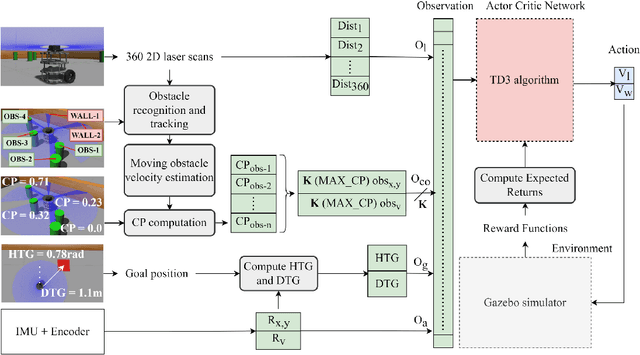
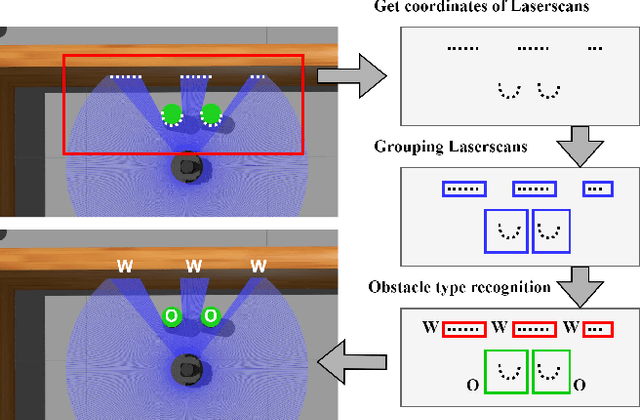
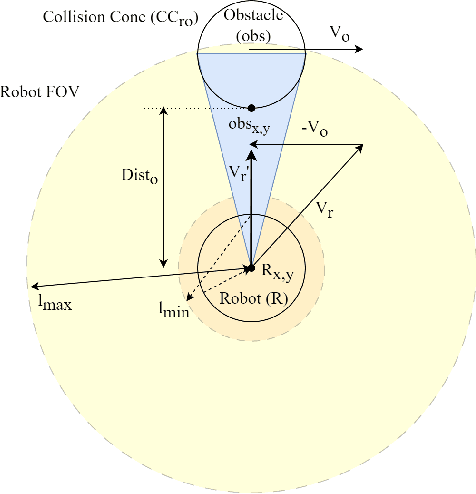
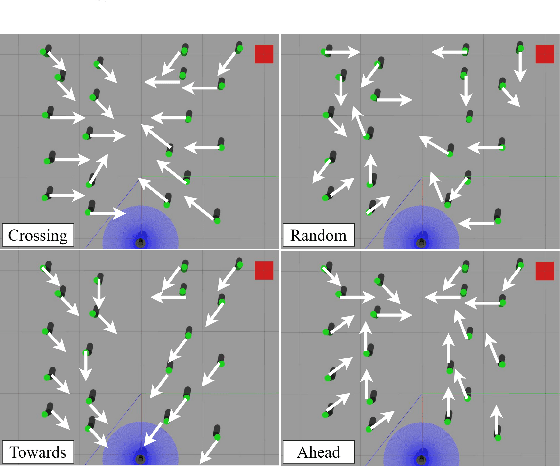
Classical map-based navigation methods are commonly used for robot navigation, but they often struggle in crowded environments due to the Frozen Robot Problem (FRP). Deep reinforcement learning-based methods address the FRP problem, however, suffer from the issues of generalization and scalability. To overcome these challenges, we propose a method that uses Collision Probability (CP) to help the robot navigate safely through crowds. The inclusion of CP in the observation space gives the robot a sense of the level of danger of the moving crowd. The robot will navigate through the crowd when it appears safe but will take a detour when the crowd is moving aggressively. By focusing on the most dangerous obstacle, the robot will not be confused when the crowd density is high, ensuring scalability of the model. Our approach was developed using deep reinforcement learning (DRL) and trained using the Gazebo simulator in a non cooperative crowd environment with obstacles moving at randomized speeds and directions. We then evaluated our model on four different crowd-behavior scenarios with varying densities of crowds. The results shown that our method achieved a 100% success rate in all test settings. We compared our approach with a current state-of-the-art DRLbased approach, and our approach has performed significantly better. Importantly, our method is highly generalizable and requires no fine-tuning after being trained once. We further demonstrated the crowd navigation capability of our model in real-world tests.