 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAcoustic tactile sensing for mobile robot wheels
Feb 28, 2024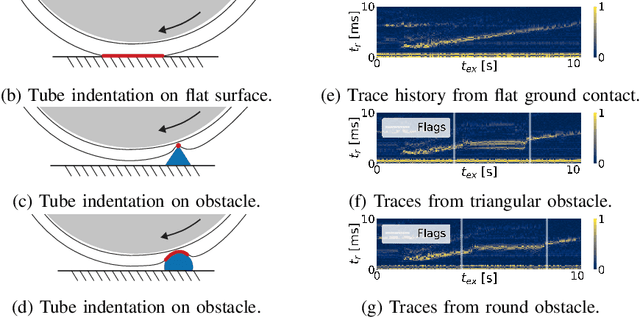


Tactile sensing in mobile robots remains under-explored, mainly due to challenges related to sensor integration and the complexities of distributed sensing. In this work, we present a tactile sensing architecture for mobile robots based on wheel-mounted acoustic waveguides. Our sensor architecture enables tactile sensing along the entire circumference of a wheel with a single active component: an off-the-shelf acoustic rangefinder. We present findings showing that our sensor, mounted on the wheel of a mobile robot, is capable of discriminating between different terrains, detecting and classifying obstacles with different geometries, and performing collision detection via contact localization. We also present a comparison between our sensor and sensors traditionally used in mobile robots, and point to the potential for sensor fusion approaches that leverage the unique capabilities of our tactile sensing architecture. Our findings demonstrate that autonomous mobile robots can further leverage our sensor architecture for diverse mapping tasks requiring knowledge of terrain material, surface topology, and underlying structure.