 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards real-time object recognition and pose estimation in point clouds
Nov 27, 2020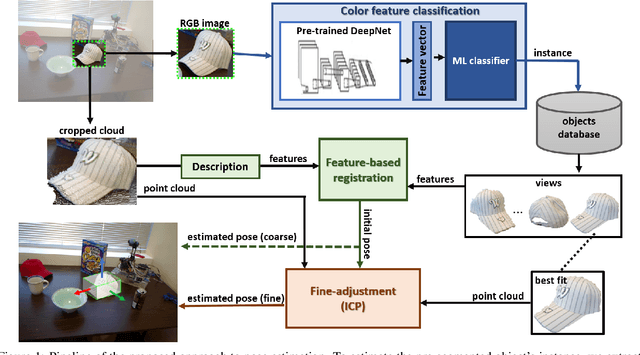
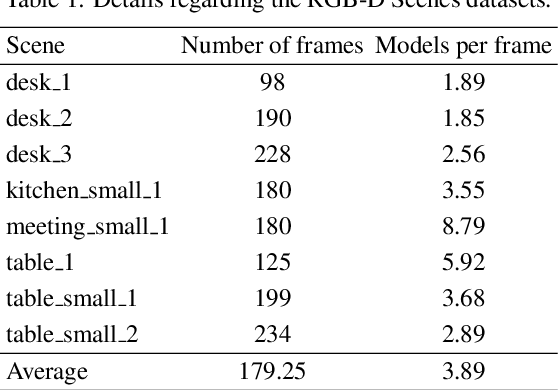

Object recognition and 6DoF pose estimation are quite challenging tasks in computer vision applications. Despite efficiency in such tasks, standard methods deliver far from real-time processing rates. This paper presents a novel pipeline to estimate a fine 6DoF pose of objects, applied to realistic scenarios in real-time. We split our proposal into three main parts. Firstly, a Color feature classification leverages the use of pre-trained CNN color features trained on the ImageNet for object detection. A Feature-based registration module conducts a coarse pose estimation, and finally, a Fine-adjustment step performs an ICP-based dense registration. Our proposal achieves, in the best case, an accuracy performance of almost 83\% on the RGB-D Scenes dataset. Regarding processing time, the object detection task is done at a frame processing rate up to 90 FPS, and the pose estimation at almost 14 FPS in a full execution strategy. We discuss that due to the proposal's modularity, we could let the full execution occurs only when necessary and perform a scheduled execution that unlocks real-time processing, even for multitask situations.