 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIcSDE+ -- An Indicator for Constrained Multi-Objective Optimization
May 30, 2023
The effectiveness of Constrained Multi-Objective Evolutionary Algorithms (CMOEAs) depends on their ability to reach the different feasible regions during evolution, by exploiting the information present in infeasible solutions, in addition to optimizing the several conflicting objectives. Over the years, researchers have proposed several CMOEAs to handle CMOPs. However, among the different CMOEAs proposed most of them are either decomposition-based or Pareto-based, with little focus on indicator-based CMOEAs. In literature, most indicator-based CMOEAs employ - a) traditional indicators used to solve unconstrained multi-objective problems to find the indicator values using objectives values and combine them with overall constraint violation to solve Constrained Multi-objective Optimization Problem (CMOP) as a single objective constraint problem, or b) consider each constraint or the overall constraint violation as objective(s) in addition to the actual objectives. In this paper, we propose an effective single-population indicator-based CMOEA referred to as IcSDE+ that can explore the different feasible regions in the search space. IcSDE+ is an (I)ndicator, that is an efficient fusion of constraint violation (c), shift-based density estimation (SDE) and sum of objectives (+). The performance of CMOEA with IcSDE+ is favorably compared against 9 state-of-the-art CMOEAs on 6 different benchmark suites with diverse characteristics
GridShift: A Faster Mode-seeking Algorithm for Image Segmentation and Object Tracking
Jun 05, 2022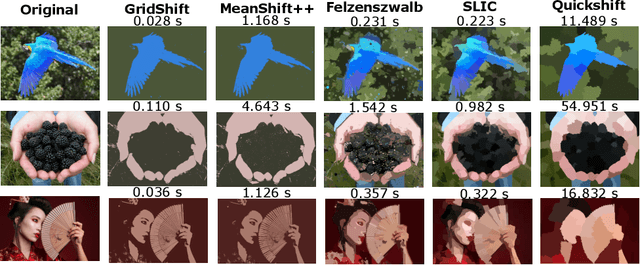
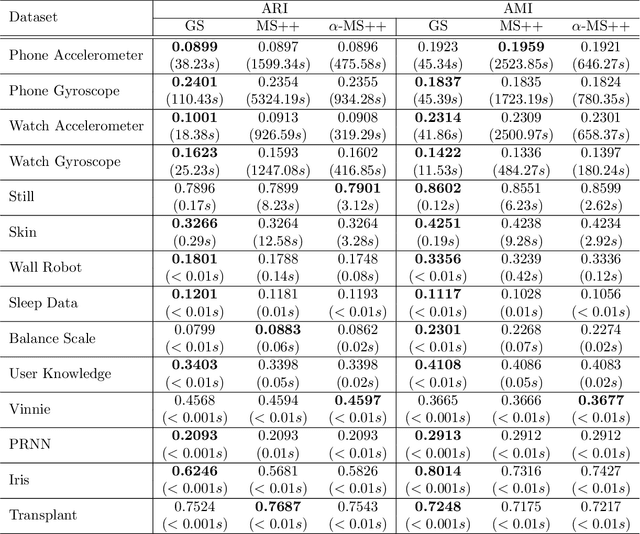
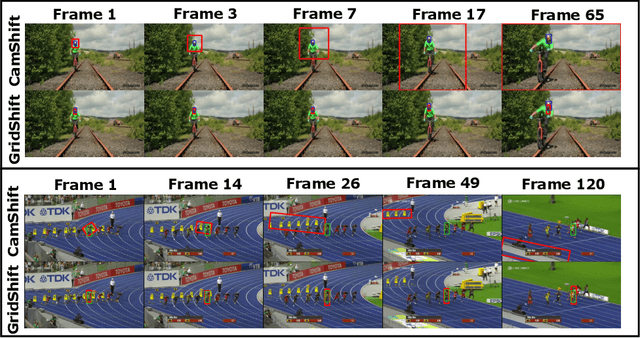
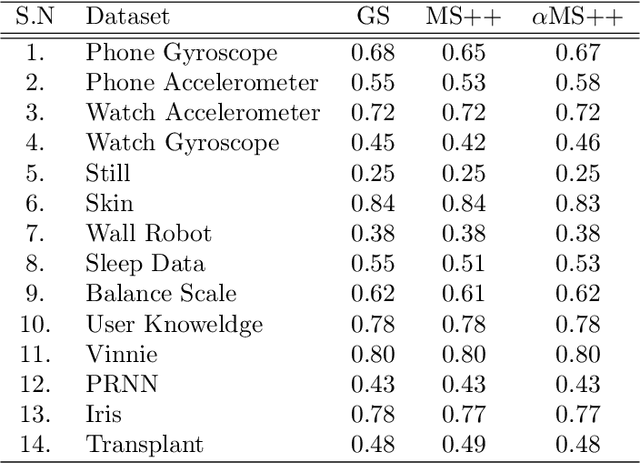
In machine learning and computer vision, mean shift (MS) qualifies as one of the most popular mode-seeking algorithms used for clustering and image segmentation. It iteratively moves each data point to the weighted mean of its neighborhood data points. The computational cost required to find the neighbors of each data point is quadratic to the number of data points. Consequently, the vanilla MS appears to be very slow for large-scale datasets. To address this issue, we propose a mode-seeking algorithm called GridShift, with significant speedup and principally based on MS. To accelerate, GridShift employs a grid-based approach for neighbor search, which is linear in the number of data points. In addition, GridShift moves the active grid cells (grid cells associated with at least one data point) in place of data points towards the higher density, a step that provides more speedup. The runtime of GridShift is linear in the number of active grid cells and exponential in the number of features. Therefore, it is ideal for large-scale low-dimensional applications such as object tracking and image segmentation. Through extensive experiments, we showcase the superior performance of GridShift compared to other MS-based as well as state-of-the-art algorithms in terms of accuracy and runtime on benchmark datasets for image segmentation. Finally, we provide a new object-tracking algorithm based on GridShift and show promising results for object tracking compared to CamShift and meanshift++.