 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Subsampling for ROI-based Visual Tracking: Algorithms and FPGA Implementation
Jan 17, 2022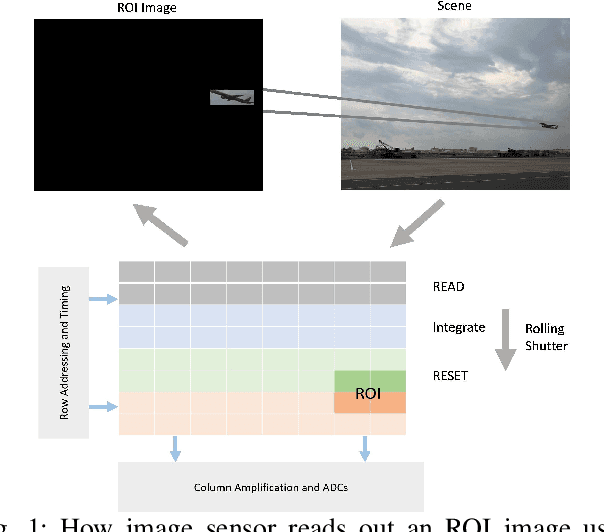

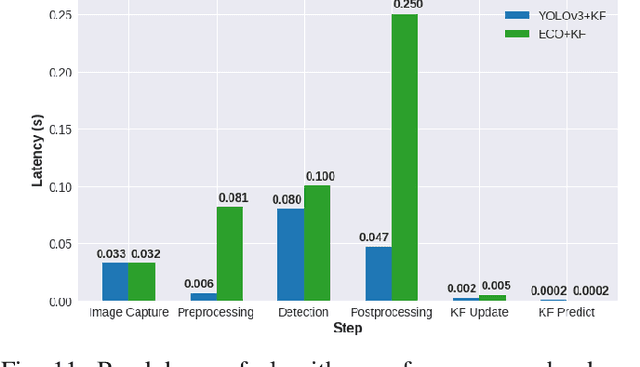
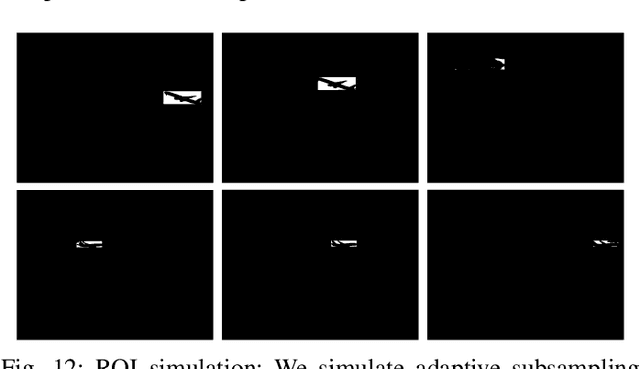
There is tremendous scope for improving the energy efficiency of embedded vision systems by incorporating programmable region-of-interest (ROI) readout in the image sensor design. In this work, we study how ROI programmability can be leveraged for tracking applications by anticipating where the ROI will be located in future frames and switching pixels off outside of this region. We refer to this process of ROI prediction and corresponding sensor configuration as adaptive subsampling. Our adaptive subsampling algorithms comprise an object detector and an ROI predictor (Kalman filter) which operate in conjunction to optimize the energy efficiency of the vision pipeline with the end task being object tracking. To further facilitate the implementation of our adaptive algorithms in real life, we select a candidate algorithm and map it onto an FPGA. Leveraging Xilinx Vitis AI tools, we designed and accelerated a YOLO object detector-based adaptive subsampling algorithm. In order to further improve the algorithm post-deployment, we evaluated several competing baselines on the OTB100 and LaSOT datasets. We found that coupling the ECO tracker with the Kalman filter has a competitive AUC score of 0.4568 and 0.3471 on the OTB100 and LaSOT datasets respectively. Further, the power efficiency of this algorithm is on par with, and in a couple of instances superior to, the other baselines. The ECO-based algorithm incurs a power consumption of approximately 4 W averaged across both datasets while the YOLO-based approach requires power consumption of approximately 6 W (as per our power consumption model). In terms of accuracy-latency tradeoff, the ECO-based algorithm provides near-real-time performance (19.23 FPS) while managing to attain competitive tracking precision.