 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOne After Another: Learning Incremental Skills for a Changing World
Mar 21, 2022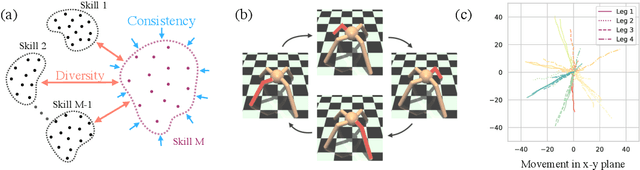
Reward-free, unsupervised discovery of skills is an attractive alternative to the bottleneck of hand-designing rewards in environments where task supervision is scarce or expensive. However, current skill pre-training methods, like many RL techniques, make a fundamental assumption - stationary environments during training. Traditional methods learn all their skills simultaneously, which makes it difficult for them to both quickly adapt to changes in the environment, and to not forget earlier skills after such adaptation. On the other hand, in an evolving or expanding environment, skill learning must be able to adapt fast to new environment situations while not forgetting previously learned skills. These two conditions make it difficult for classic skill discovery to do well in an evolving environment. In this work, we propose a new framework for skill discovery, where skills are learned one after another in an incremental fashion. This framework allows newly learned skills to adapt to new environment or agent dynamics, while the fixed old skills ensure the agent doesn't forget a learned skill. We demonstrate experimentally that in both evolving and static environments, incremental skills significantly outperform current state-of-the-art skill discovery methods on both skill quality and the ability to solve downstream tasks. Videos for learned skills and code are made public on https://notmahi.github.io/disk
The Surprising Effectiveness of Representation Learning for Visual Imitation
Dec 06, 2021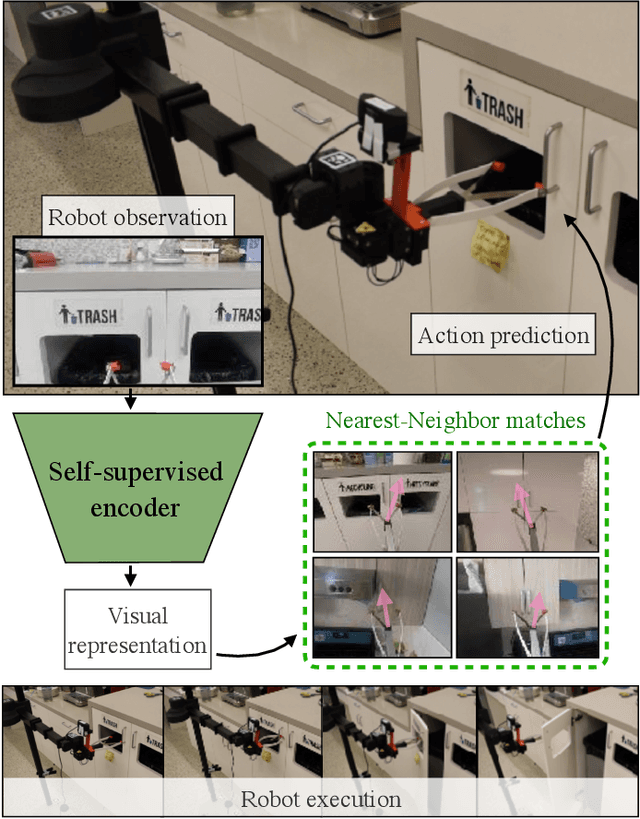
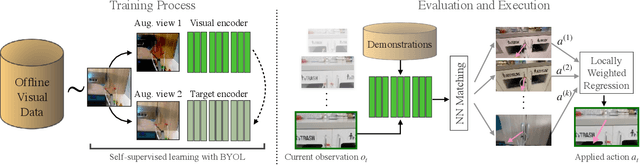
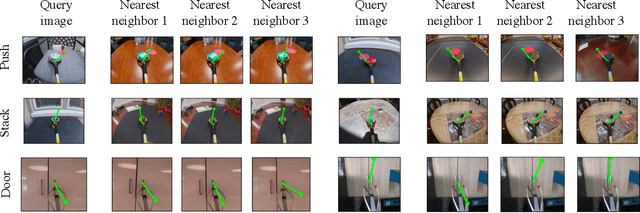

While visual imitation learning offers one of the most effective ways of learning from visual demonstrations, generalizing from them requires either hundreds of diverse demonstrations, task specific priors, or large, hard-to-train parametric models. One reason such complexities arise is because standard visual imitation frameworks try to solve two coupled problems at once: learning a succinct but good representation from the diverse visual data, while simultaneously learning to associate the demonstrated actions with such representations. Such joint learning causes an interdependence between these two problems, which often results in needing large amounts of demonstrations for learning. To address this challenge, we instead propose to decouple representation learning from behavior learning for visual imitation. First, we learn a visual representation encoder from offline data using standard supervised and self-supervised learning methods. Once the representations are trained, we use non-parametric Locally Weighted Regression to predict the actions. We experimentally show that this simple decoupling improves the performance of visual imitation models on both offline demonstration datasets and real-robot door opening compared to prior work in visual imitation. All of our generated data, code, and robot videos are publicly available at https://jyopari.github.io/VINN/.
Training for Faster Adversarial Robustness Verification via Inducing ReLU Stability
Sep 26, 2018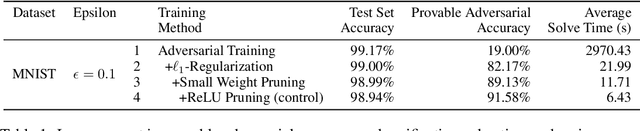
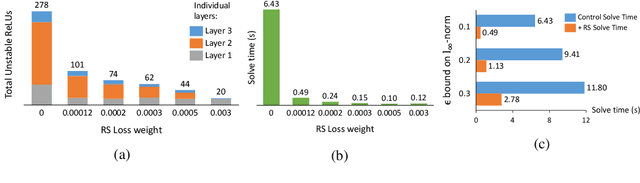

We explore the concept of co-design in the context of neural network verification. Specifically, we aim to train deep neural networks that not only are robust to adversarial perturbations but also whose robustness can be verified more easily. To this end, we identify two properties of network models - weight sparsity and so-called ReLU stability - that turn out to significantly impact the complexity of the corresponding verification task. We demonstrate that improving weight sparsity alone already enables us to turn computationally intractable verification problems into tractable ones. Then, improving ReLU stability leads to an additional 4-13x speedup in verification times. An important feature of our methodology is its "universality," in the sense that it can be used with a broad range of training procedures and verification approaches.