 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMechanical Design of a Cartesian Manipulator for Warehouse Pick and Place
Jun 18, 2018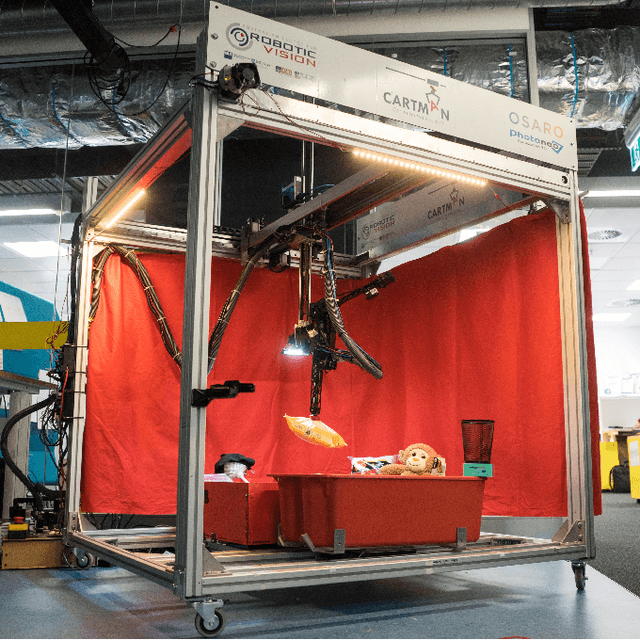
Robotic manipulation and grasping in cluttered and unstructured environments is a current challenge for robotics. Enabling robots to operate in these challenging environments have direct applications from automating warehouses to harvesting fruit in agriculture. One of the main challenges associated with these difficult robotic manipulation tasks is the motion planning and control problem for multi-DoF (Degree of Freedom) manipulators. This paper presents the design and performance evaluation of a low-cost Cartesian manipulator, Cartman who took first place in the Amazon Robotics Challenge 2017. It can perform pick and place tasks of household items in a cluttered environment. The robot is capable of linear speeds of 1 m/s and angular speeds of 1.5 rad/s, capable of sub-millimetre static accuracy and safe payload capacity of 2kg. Cartman can be produced for under 10 000 AUD. The complete design is open sourced and can be found at http://juxi.net/projects/AmazonRoboticsChallenge.