 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Step Prediction of Occupancy Grid Maps with Recurrent Neural Networks
Jan 22, 2019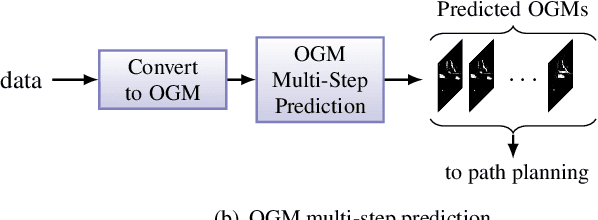
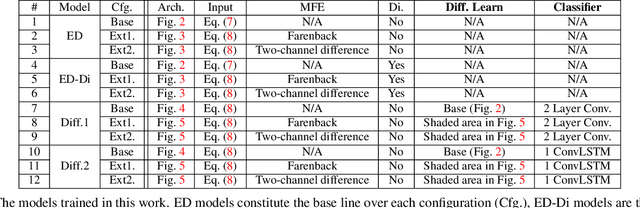
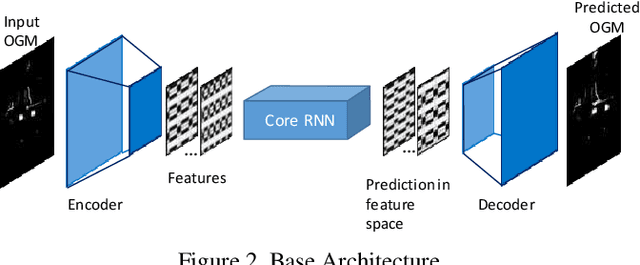

We investigate the multi-step prediction of the drivable space, represented by Occupancy Grid Maps (OGMs), for autonomous vehicles. Our motivation is that accurate multi-step prediction of the drivable space can efficiently improve path planning and navigation resulting in safe, comfortable and optimum paths in autonomous driving. We train a variety of Recurrent Neural Network (RNN) based architectures on the OGM sequences from the KITTI dataset. The results demonstrate significant improvement of the prediction accuracy using our proposed difference learning method, incorporating motion related features, over the state of the art. We remove the egomotion from the OGM sequences by transforming them into a common frame. Although in the transformed sequences the KITTI dataset is heavily biased toward static objects, by learning the difference between subsequent OGMs, our proposed method provides accurate prediction over both the static and moving objects.
Multi-Step Prediction of Dynamic Systems with Recurrent Neural Networks
May 20, 2018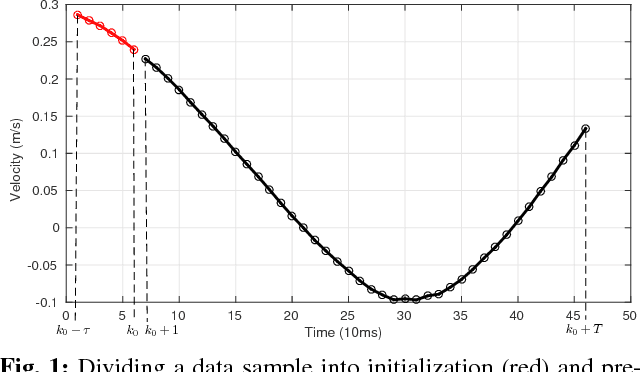
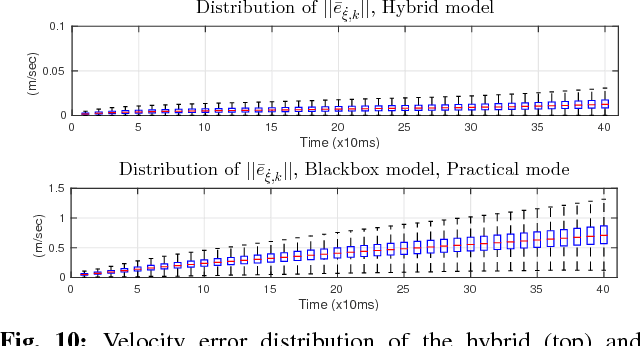
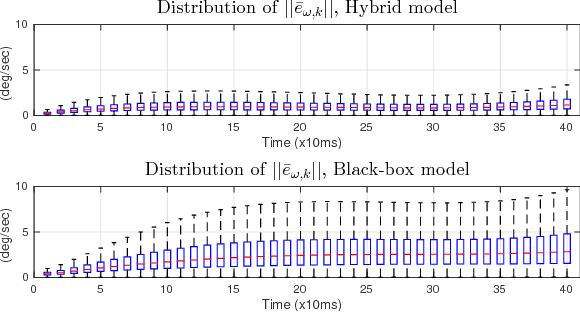
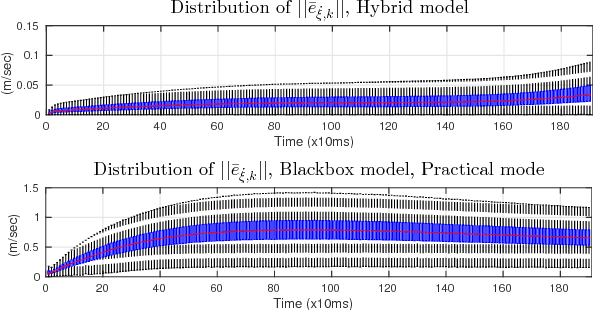
Recurrent Neural Networks (RNNs) can encode rich dynamics which makes them suitable for modeling dynamic systems. To train an RNN for multi-step prediction of dynamic systems, it is crucial to efficiently address the state initialization problem, which seeks proper values for the RNN initial states at the beginning of each prediction interval. In this work, the state initialization problem is addressed using Neural Networks (NNs) to effectively train a variety of RNNs for modeling two aerial vehicles, a helicopter and a quadrotor, from experimental data. It is shown that the RNN initialized by the NN-based initialization method outperforms the state of the art. Further, a comprehensive study of RNNs trained for multi-step prediction of the two aerial vehicles is presented. The multi-step prediction of the quadrotor is enhanced using a hybrid model which combines a simplified physics-based motion model of the vehicle with RNNs. While the maximum translational and rotational velocities in the quadrotor dataset are about 4 m/s and 3.8 rad/s, respectively, the hybrid model produces predictions, over 1.9 second, which remain within 9 cm/s and 0.12 rad/s of the measured translational and rotational velocities, with 99\% confidence on the test dataset