 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimation and Exploitation of Objects' Inertial Parameters in Robotic Grasping and Manipulation: A Survey
Nov 11, 2019
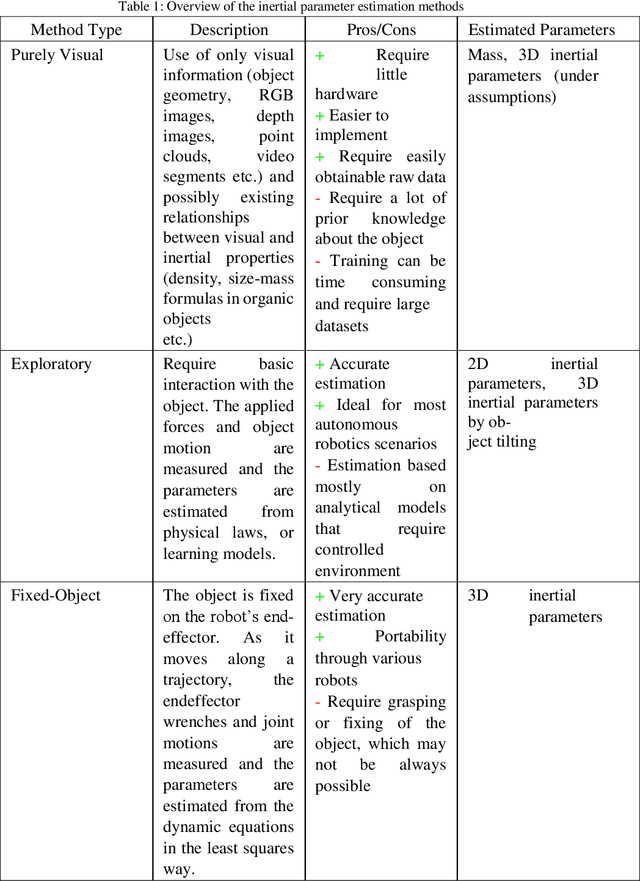

Inertial parameters characterise an object's motion under applied forces, and can provide strong priors for planning and control of robotic actions to manipulate the object. However, these parameters are not available a-priori in situations where a robot encounters new objects. In this paper, we describe and categorise the ways that a robot can identify an object's inertial parameters. We also discuss grasping and manipulation methods in which knowledge of inertial parameters is exploited in various ways. We begin with a discussion of literature which investigates how humans estimate the inertial parameters of objects, to provide background and motivation for this area of robotics research. We frame our discussion of the robotics literature in terms of three categories of estimation methods, according to the amount of interaction with the object: purely visual, exploratory, and fixed-object. Each category is analysed and discussed. To demonstrate the usefulness of inertial estimation research, we describe a number of grasping and manipulation applications that make use of the inertial parameters of objects. The aim of the paper is to thoroughly review and categorise existing work in an important, but under-explored, area of robotics research, present its background and applications, and suggest future directions. Note that this paper does not examine methods of identification of the robot's inertial parameters, but rather the identification of inertial parameters of other objects which the robot is tasked with manipulating.
Grasp that optimises objectives along post-grasp trajectories
Dec 12, 2017

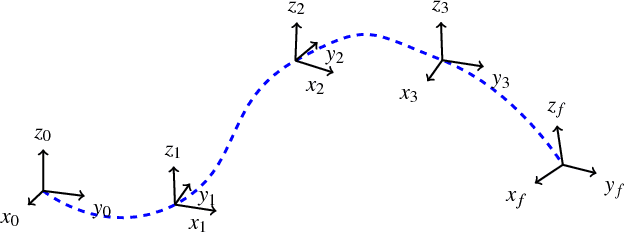
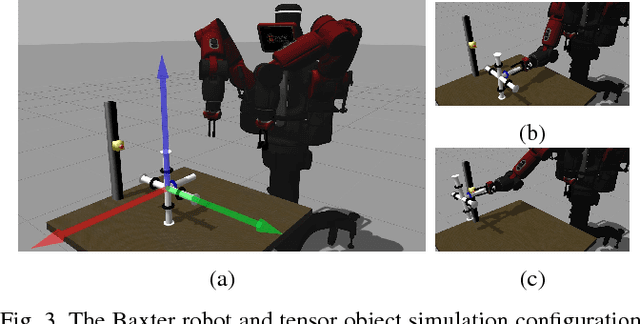
In this article, we study the problem of selecting a grasping pose on the surface of an object to be manipulated by considering three post-grasp objectives. These objectives include (i) kinematic manipulation capability, (ii) torque effort \cite{mavrakis2016analysis} and (iii) impact force in case of a collision during post-grasp manipulative actions. In these works, the main assumption is that a manipulation task, i.e. trajectory of the centre of mass (CoM) of an object is given. In addition, inertial properties of the object to be manipulated is known. For example, a robot needs to pick an object located at point A and place it at point B by moving it along a given path. Therefore, the problem to be solved is to find an initial grasp pose that yields the maximum kinematic manipulation capability, minimum joint effort and effective mass along a given post-grasp trajectories. However, these objectives may conflict in some cases making it impossible to obtain the best values for all of them. We perform a series of experiments to show how different objectives change as the grasping pose on an object alters. The experimental results presented in this paper illustrate that these objectives are conflicting for some desired post-grasp trajectories. This indicates that a detailed multi-objective optimization is needed for properly addressing this problem in a future work.
Safe Robotic Grasping: Minimum Impact-Force Grasp Selection
Jul 25, 2017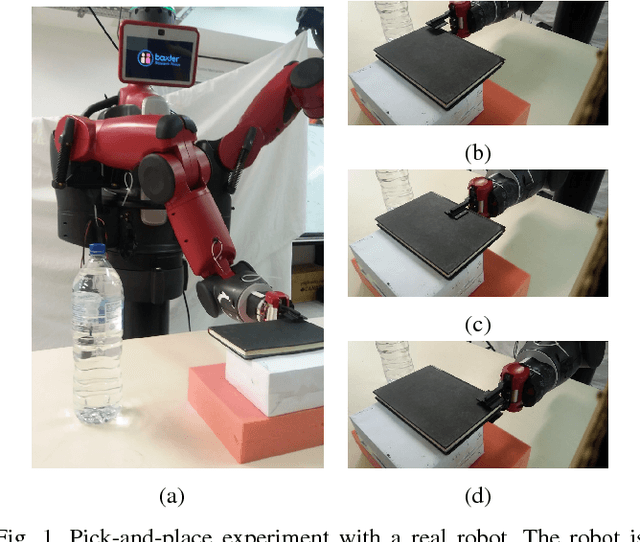
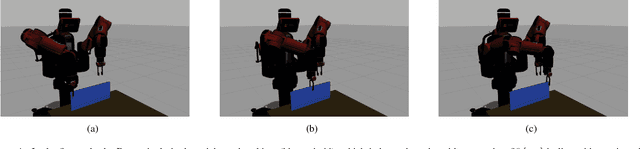
This paper addresses the problem of selecting from a choice of possible grasps, so that impact forces will be minimised if a collision occurs while the robot is moving the grasped object along a post-grasp trajectory. Such considerations are important for safety in human-robot interaction, where even a certified "human-safe" (e.g. compliant) arm may become hazardous once it grasps and begins moving an object, which may have significant mass, sharp edges or other dangers. Additionally, minimising collision forces is critical to preserving the longevity of robots which operate in uncertain and hazardous environments, e.g. robots deployed for nuclear decommissioning, where removing a damaged robot from a contaminated zone for repairs may be extremely difficult and costly. Also, unwanted collisions between a robot and critical infrastructure (e.g. pipework) in such high-consequence environments can be disastrous. In this paper, we investigate how the safety of the post-grasp motion can be considered during the pre-grasp approach phase, so that the selected grasp is optimal in terms applying minimum impact forces if a collision occurs during a desired post-grasp manipulation. We build on the methods of augmented robot-object dynamics models and "effective mass" and propose a method for combining these concepts with modern grasp and trajectory planners, to enable the robot to achieve a grasp which maximises the safety of the post-grasp trajectory, by minimising potential collision forces. We demonstrate the effectiveness of our approach through several experiments with both simulated and real robots.