 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimation and Exploitation of Objects' Inertial Parameters in Robotic Grasping and Manipulation: A Survey
Paper and Code
Nov 11, 2019
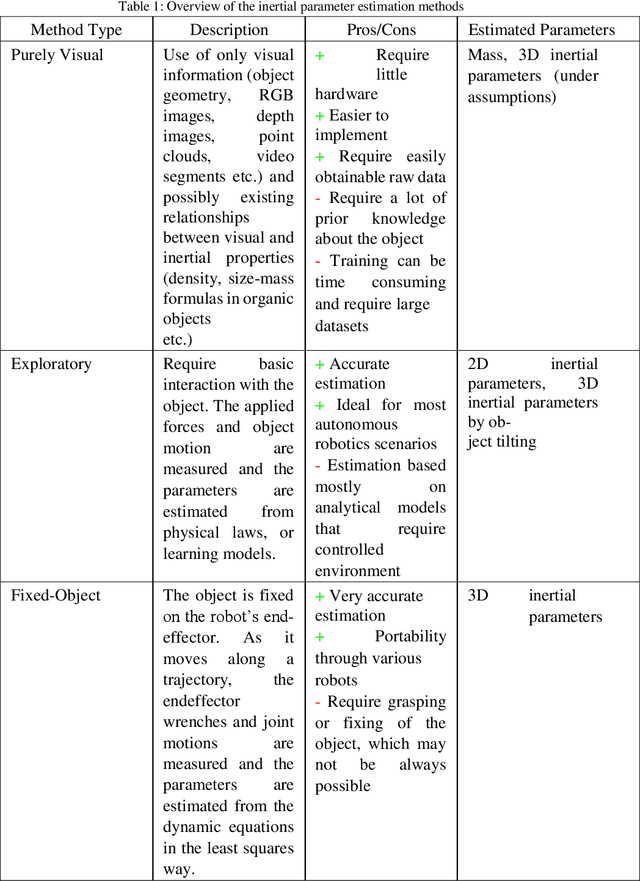

Inertial parameters characterise an object's motion under applied forces, and can provide strong priors for planning and control of robotic actions to manipulate the object. However, these parameters are not available a-priori in situations where a robot encounters new objects. In this paper, we describe and categorise the ways that a robot can identify an object's inertial parameters. We also discuss grasping and manipulation methods in which knowledge of inertial parameters is exploited in various ways. We begin with a discussion of literature which investigates how humans estimate the inertial parameters of objects, to provide background and motivation for this area of robotics research. We frame our discussion of the robotics literature in terms of three categories of estimation methods, according to the amount of interaction with the object: purely visual, exploratory, and fixed-object. Each category is analysed and discussed. To demonstrate the usefulness of inertial estimation research, we describe a number of grasping and manipulation applications that make use of the inertial parameters of objects. The aim of the paper is to thoroughly review and categorise existing work in an important, but under-explored, area of robotics research, present its background and applications, and suggest future directions. Note that this paper does not examine methods of identification of the robot's inertial parameters, but rather the identification of inertial parameters of other objects which the robot is tasked with manipulating.