 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Survey of AI Methods for Geometry Preparation and Mesh Generation in Engineering Simulation
Dec 16, 2025Artificial intelligence is beginning to ease long-standing bottlenecks in the CAD-to-mesh pipeline. This survey reviews recent advances where machine learning aids part classification, mesh quality prediction, and defeaturing. We explore methods that improve unstructured and block-structured meshing, support volumetric parameterizations, and accelerate parallel mesh generation. We also examine emerging tools for scripting automation, including reinforcement learning and large language models. Across these efforts, AI acts as an assistive technology, extending the capabilities of traditional geometry and meshing tools. The survey highlights representative methods, practical deployments, and key research challenges that will shape the next generation of data-driven meshing workflows.
Toward Personalizing Quantum Computing Education: An Evolutionary LLM-Powered Approach
Apr 24, 2025Quantum computing education faces significant challenges due to its complexity and the limitations of current tools; this paper introduces a novel Intelligent Teaching Assistant for quantum computing education and details its evolutionary design process. The system combines a knowledge-graph-augmented architecture with two specialized Large Language Model (LLM) agents: a Teaching Agent for dynamic interaction, and a Lesson Planning Agent for lesson plan generation. The system is designed to adapt to individual student needs, with interactions meticulously tracked and stored in a knowledge graph. This graph represents student actions, learning resources, and relationships, aiming to enable reasoning about effective learning pathways. We describe the implementation of the system, highlighting the challenges encountered and the solutions implemented, including introducing a dual-agent architecture where tasks are separated, all coordinated through a central knowledge graph that maintains system awareness, and a user-facing tag system intended to mitigate LLM hallucination and improve user control. Preliminary results illustrate the system's potential to capture rich interaction data, dynamically adapt lesson plans based on student feedback via a tag system in simulation, and facilitate context-aware tutoring through the integrated knowledge graph, though systematic evaluation is required.
Real-Time Dynamic Data Driven Deformable Registration for Image-Guided Neurosurgery: Computational Aspects
Sep 06, 2023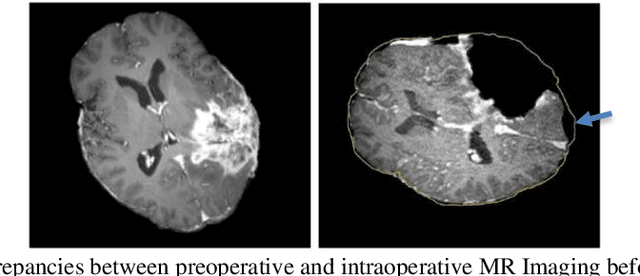
Current neurosurgical procedures utilize medical images of various modalities to enable the precise location of tumors and critical brain structures to plan accurate brain tumor resection. The difficulty of using preoperative images during the surgery is caused by the intra-operative deformation of the brain tissue (brain shift), which introduces discrepancies concerning the preoperative configuration. Intra-operative imaging allows tracking such deformations but cannot fully substitute for the quality of the pre-operative data. Dynamic Data Driven Deformable Non-Rigid Registration (D4NRR) is a complex and time-consuming image processing operation that allows the dynamic adjustment of the pre-operative image data to account for intra-operative brain shift during the surgery. This paper summarizes the computational aspects of a specific adaptive numerical approximation method and its variations for registering brain MRIs. It outlines its evolution over the last 15 years and identifies new directions for the computational aspects of the technique.
Advancing Intra-operative Precision: Dynamic Data-Driven Non-Rigid Registration for Enhanced Brain Tumor Resection in Image-Guided Neurosurgery
Aug 31, 2023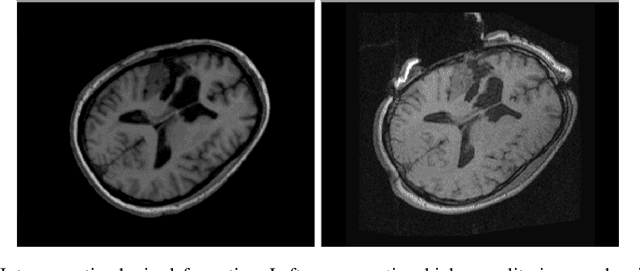
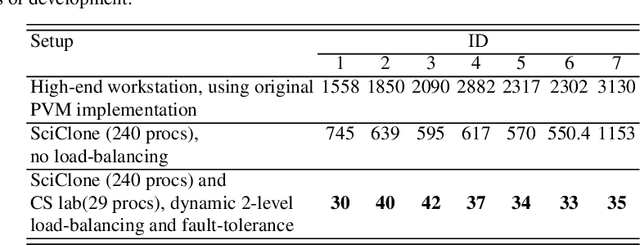
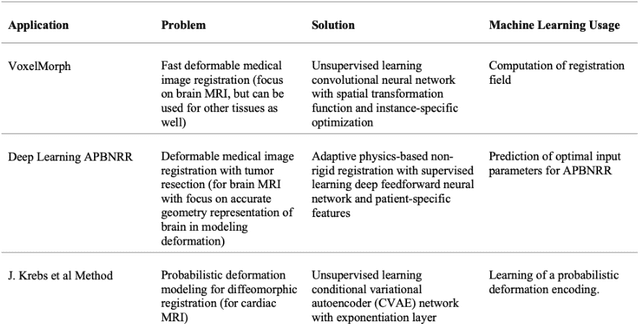
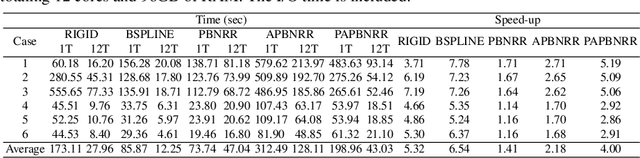
During neurosurgery, medical images of the brain are used to locate tumors and critical structures, but brain tissue shifts make pre-operative images unreliable for accurate removal of tumors. Intra-operative imaging can track these deformations but is not a substitute for pre-operative data. To address this, we use Dynamic Data-Driven Non-Rigid Registration (NRR), a complex and time-consuming image processing operation that adjusts the pre-operative image data to account for intra-operative brain shift. Our review explores a specific NRR method for registering brain MRI during image-guided neurosurgery and examines various strategies for improving the accuracy and speed of the NRR method. We demonstrate that our implementation enables NRR results to be delivered within clinical time constraints while leveraging Distributed Computing and Machine Learning to enhance registration accuracy by identifying optimal parameters for the NRR method. Additionally, we highlight challenges associated with its use in the operating room.
Using Artificial Intelligence for Particle Track Identification in CLAS12 Detector
Aug 28, 2020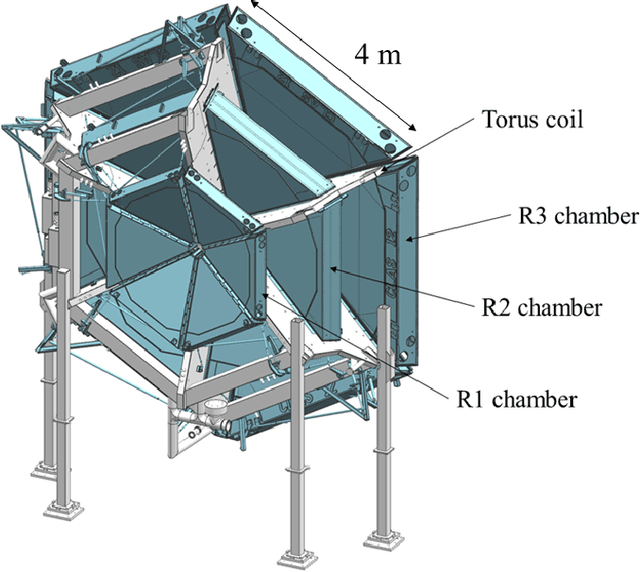
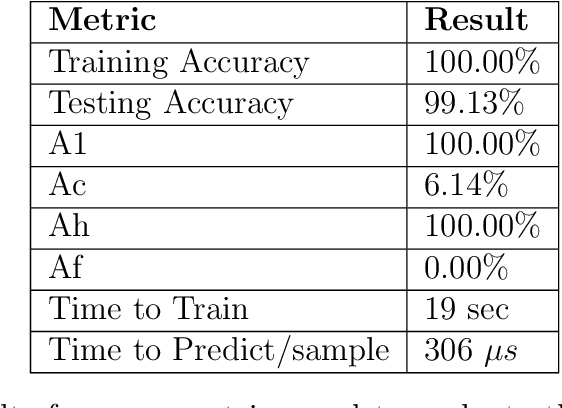
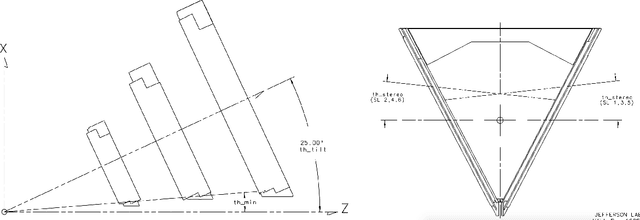

In this article we describe the development of machine learning models to assist the CLAS12 tracking algorithm by identifying the best track candidates from combinatorial track candidates from the hits in drift chambers. Several types of machine learning models were tested, including: Convolutional Neural Networks (CNN), Multi-Layer Perceptron (MLP) and Extremely Randomized Trees (ERT). The final implementation was based on an MLP network and provided an accuracy $>99\%$. The implementation of AI assisted tracking into the CLAS12 reconstruction workflow and provided a 6 times code speedup.