 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge2-Level Reinforcement Learning for Ships on Inland Waterways
Jul 25, 2023



This paper proposes a realistic modularized framework for controlling autonomous surface vehicles (ASVs) on inland waterways (IWs) based on deep reinforcement learning (DRL). The framework comprises two levels: a high-level local path planning (LPP) unit and a low-level path following (PF) unit, each consisting of a DRL agent. The LPP agent is responsible for planning a path under consideration of nearby vessels, traffic rules, and the geometry of the waterway. We thereby leverage a recently proposed spatial-temporal recurrent neural network architecture, which is transferred to continuous action spaces. The PF agent is responsible for low-level actuator control while accounting for shallow water influences on the marine craft and the environmental forces winds, waves, and currents. Both agents are thoroughly validated in simulation, employing the lower Elbe in northern Germany as an example case and using real AIS trajectories to model the behavior of other ships.
Robust Path Following on Rivers Using Bootstrapped Reinforcement Learning
Mar 24, 2023
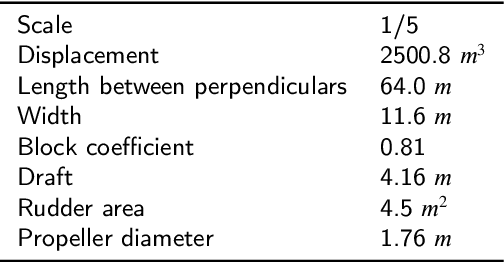

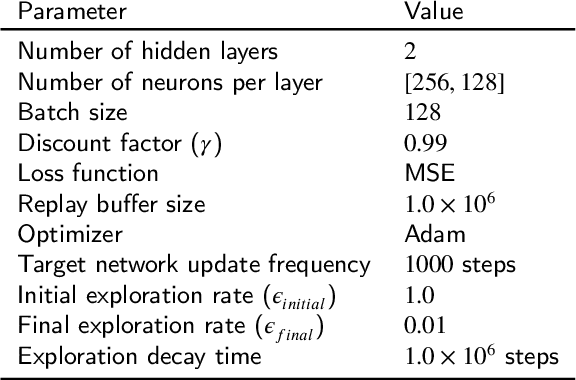
This paper develops a Deep Reinforcement Learning (DRL)-agent for navigation and control of autonomous surface vessels (ASV) on inland waterways. Spatial restrictions due to waterway geometry and the resulting challenges, such as high flow velocities or shallow banks, require controlled and precise movement of the ASV. A state-of-the-art bootstrapped Q-learning algorithm in combination with a versatile training environment generator leads to a robust and accurate rudder controller. To validate our results, we compare the path-following capabilities of the proposed approach to a vessel-specific PID controller on real-world river data from the lower- and middle Rhine, indicating that the DRL algorithm could effectively prove generalizability even in never-seen scenarios while simultaneously attaining high navigational accuracy.