 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Reliability Management in Neuromorphic Computing
May 05, 2021
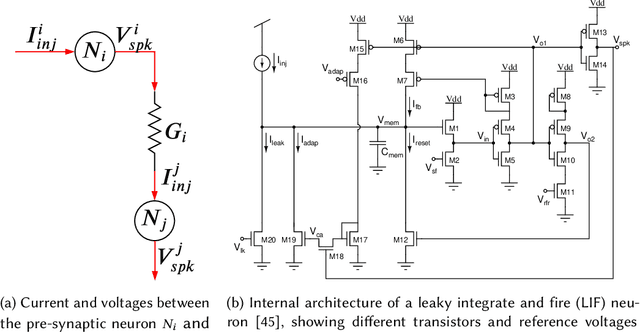

Neuromorphic computing systems uses non-volatile memory (NVM) to implement high-density and low-energy synaptic storage. Elevated voltages and currents needed to operate NVMs cause aging of CMOS-based transistors in each neuron and synapse circuit in the hardware, drifting the transistor's parameters from their nominal values. Aggressive device scaling increases power density and temperature, which accelerates the aging, challenging the reliable operation of neuromorphic systems. Existing reliability-oriented techniques periodically de-stress all neuron and synapse circuits in the hardware at fixed intervals, assuming worst-case operating conditions, without actually tracking their aging at run time. To de-stress these circuits, normal operation must be interrupted, which introduces latency in spike generation and propagation, impacting the inter-spike interval and hence, performance, e.g., accuracy. We propose a new architectural technique to mitigate the aging-related reliability problems in neuromorphic systems, by designing an intelligent run-time manager (NCRTM), which dynamically destresses neuron and synapse circuits in response to the short-term aging in their CMOS transistors during the execution of machine learning workloads, with the objective of meeting a reliability target. NCRTM de-stresses these circuits only when it is absolutely necessary to do so, otherwise reducing the performance impact by scheduling de-stress operations off the critical path. We evaluate NCRTM with state-of-the-art machine learning workloads on a neuromorphic hardware. Our results demonstrate that NCRTM significantly improves the reliability of neuromorphic hardware, with marginal impact on performance.
PyCARL: A PyNN Interface for Hardware-Software Co-Simulation of Spiking Neural Network
Mar 21, 2020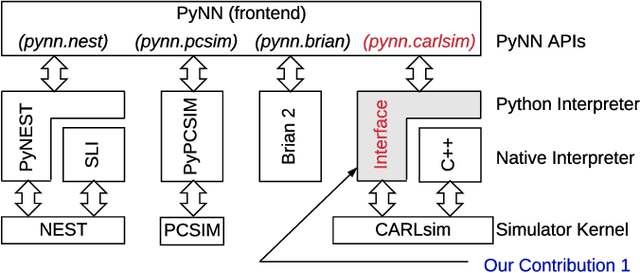
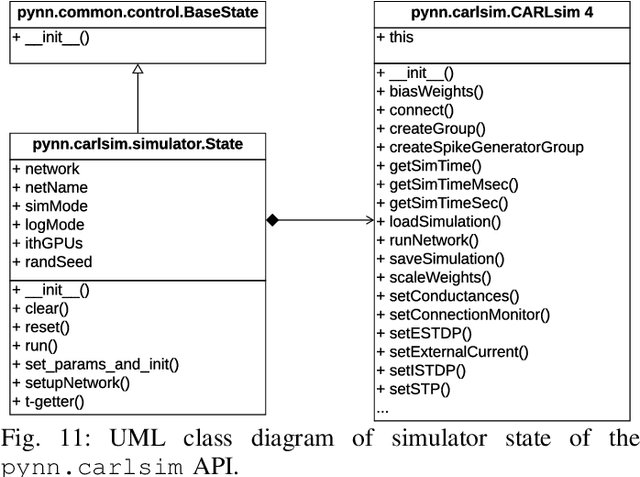

We present PyCARL, a PyNN-based common Python programming interface for hardware-software co-simulation of spiking neural network (SNN). Through PyCARL, we make the following two key contributions. First, we provide an interface of PyNN to CARLsim, a computationally-efficient, GPU-accelerated and biophysically-detailed SNN simulator. PyCARL facilitates joint development of machine learning models and code sharing between CARLsim and PyNN users, promoting an integrated and larger neuromorphic community. Second, we integrate cycle-accurate models of state-of-the-art neuromorphic hardware such as TrueNorth, Loihi, and DynapSE in PyCARL, to accurately model hardware latencies that delay spikes between communicating neurons and degrade performance. PyCARL allows users to analyze and optimize the performance difference between software-only simulation and hardware-software co-simulation of their machine learning models. We show that system designers can also use PyCARL to perform design-space exploration early in the product development stage, facilitating faster time-to-deployment of neuromorphic products. We evaluate the memory usage and simulation time of PyCARL using functionality tests, synthetic SNNs, and realistic applications. Our results demonstrate that for large SNNs, PyCARL does not lead to any significant overhead compared to CARLsim. We also use PyCARL to analyze these SNNs for a state-of-the-art neuromorphic hardware and demonstrate a significant performance deviation from software-only simulations. PyCARL allows to evaluate and minimize such differences early during model development.