 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLiDAR Odometry Methodologies for Autonomous Driving: A Survey
Sep 13, 2021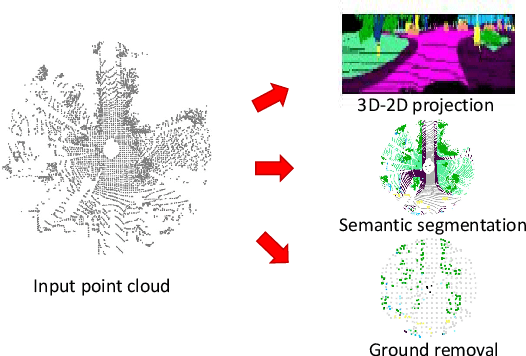
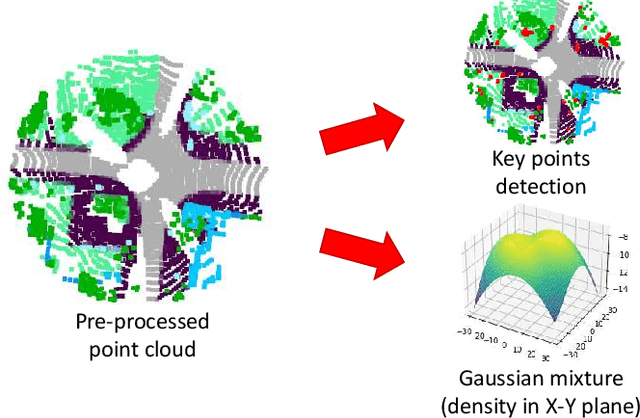
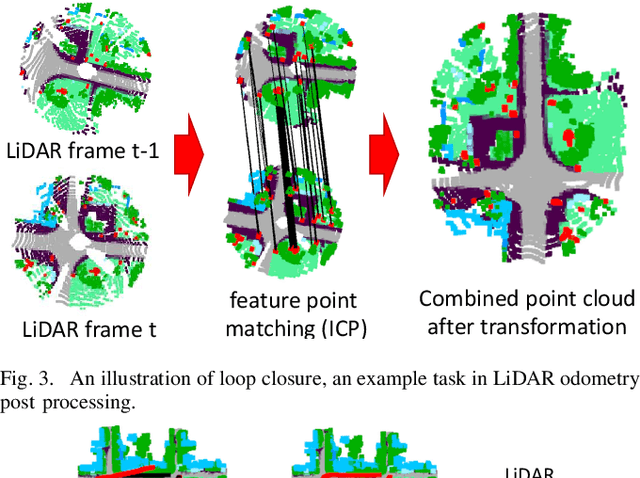
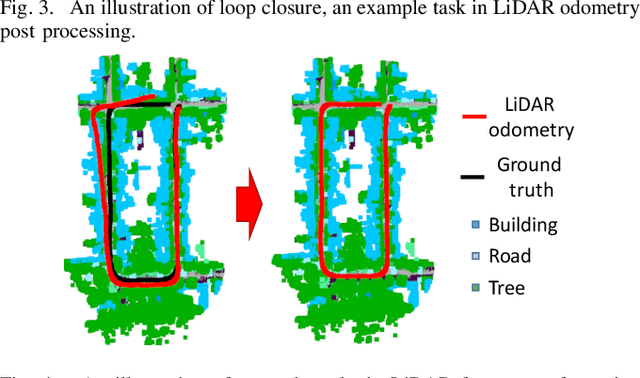
Vehicle odometry is an essential component of an automated driving system as it computes the vehicle's position and orientation. The odometry module has a higher demand and impact in urban areas where the global navigation satellite system (GNSS) signal is weak and noisy. Traditional visual odometry methods suffer from the diverse illumination status and get disparities during pose estimation, which results in significant errors as the error accumulates. Odometry using light detection and ranging (LiDAR) devices has attracted increasing research interest as LiDAR devices are robust to illumination variations. In this survey, we examine the existing LiDAR odometry methods and summarize the pipeline and delineate the several intermediate steps. Additionally, the existing LiDAR odometry methods are categorized by their correspondence type, and their advantages, disadvantages, and correlations are analyzed across-category and within-category in each step. Finally, we compare the accuracy and the running speed among these methodologies evaluated over the KITTI odometry dataset and outline promising future research directions.