 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLunar-G2R: Geometry-to-Reflectance Learning for High-Fidelity Lunar BRDF Estimation
Jan 15, 2026We address the problem of estimating realistic, spatially varying reflectance for complex planetary surfaces such as the lunar regolith, which is critical for high-fidelity rendering and vision-based navigation. Existing lunar rendering pipelines rely on simplified or spatially uniform BRDF models whose parameters are difficult to estimate and fail to capture local reflectance variations, limiting photometric realism. We propose Lunar-G2R, a geometry-to-reflectance learning framework that predicts spatially varying BRDF parameters directly from a lunar digital elevation model (DEM), without requiring multi-view imagery, controlled illumination, or dedicated reflectance-capture hardware at inference time. The method leverages a U-Net trained with differentiable rendering to minimize photometric discrepancies between real orbital images and physically based renderings under known viewing and illumination geometry. Experiments on a geographically held-out region of the Tycho crater show that our approach reduces photometric error by 38 % compared to a state-of-the-art baseline, while achieving higher PSNR and SSIM and improved perceptual similarity, capturing fine-scale reflectance variations absent from spatially uniform models. To our knowledge, this is the first method to infer a spatially varying reflectance model directly from terrain geometry.
Training Datasets Generation for Machine Learning: Application to Vision Based Navigation
Sep 17, 2024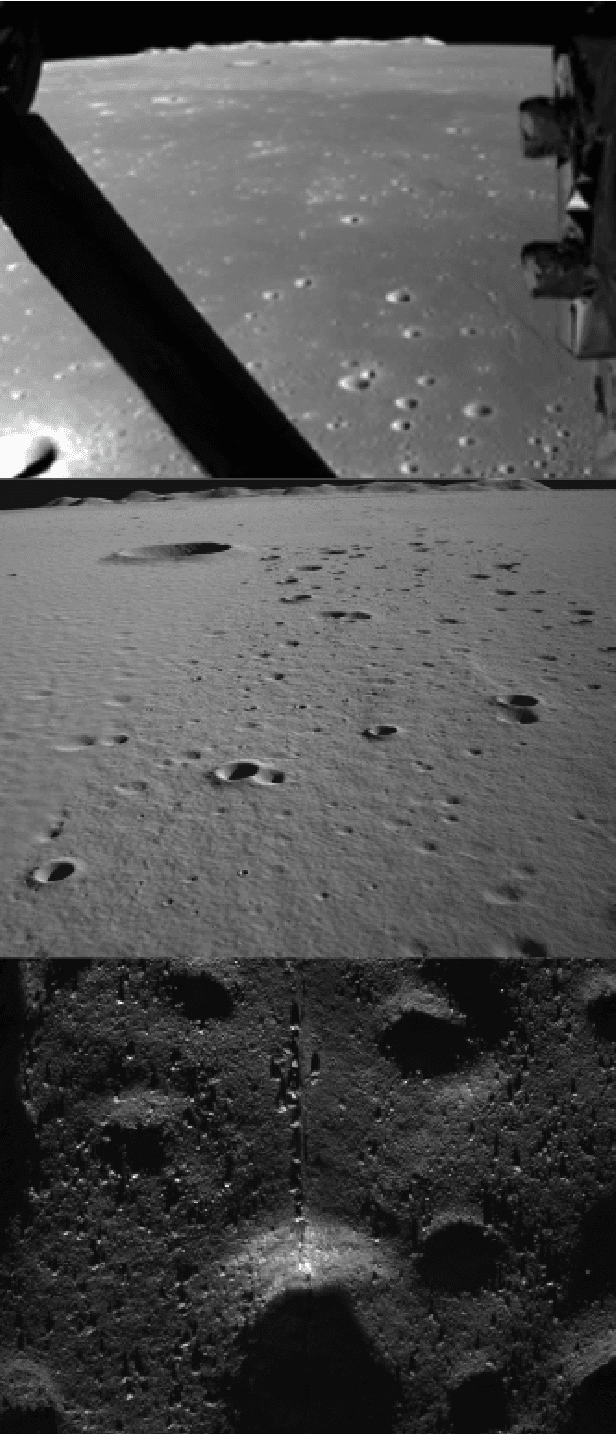

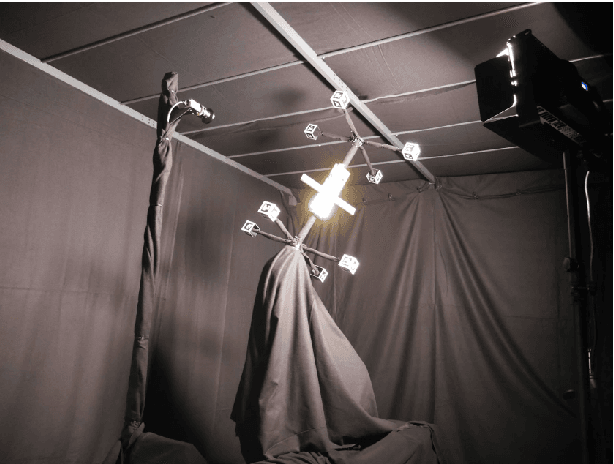
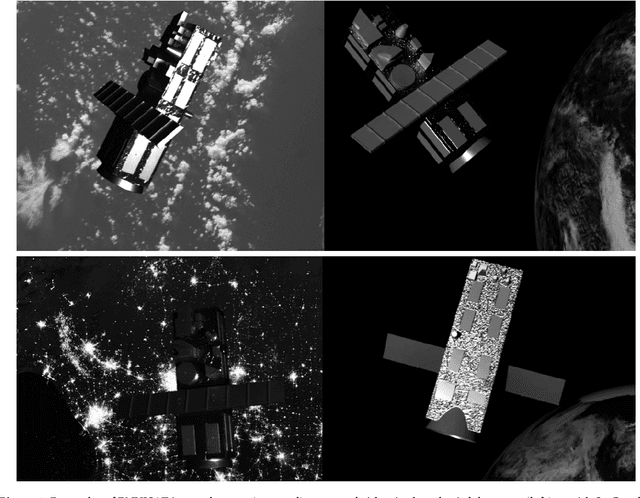
Vision Based Navigation consists in utilizing cameras as precision sensors for GNC after extracting information from images. To enable the adoption of machine learning for space applications, one of obstacles is the demonstration that available training datasets are adequate to validate the algorithms. The objective of the study is to generate datasets of images and metadata suitable for training machine learning algorithms. Two use cases were selected and a robust methodology was developed to validate the datasets including the ground truth. The first use case is in-orbit rendezvous with a man-made object: a mockup of satellite ENVISAT. The second use case is a Lunar landing scenario. Datasets were produced from archival datasets (Chang'e 3), from the laboratory at DLR TRON facility and at Airbus Robotic laboratory, from SurRender software high fidelity image simulator using Model Capture and from Generative Adversarial Networks. The use case definition included the selection of algorithms as benchmark: an AI-based pose estimation algorithm and a dense optical flow algorithm were selected. Eventually it is demonstrated that datasets produced with SurRender and selected laboratory facilities are adequate to train machine learning algorithms.