 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Backbone Network for 3D Object Detection
Jan 24, 2019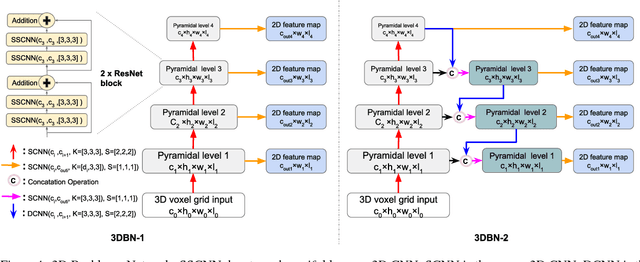
The task of detecting 3D objects in point cloud has a pivotal role in many real-world applications. However, 3D object detection performance is behind that of 2D object detection due to the lack of powerful 3D feature extraction methods. In order to address this issue, we propose to build a 3D backbone network to learn rich 3D feature maps by using sparse 3D CNN operations for 3D object detection in point cloud. The 3D backbone network can inherently learn 3D features from almost raw data without compressing point cloud into multiple 2D images and generate rich feature maps for object detection. The sparse 3D CNN takes full advantages of the sparsity in the 3D point cloud to accelerate computation and save memory, which makes the 3D backbone network achievable. Empirical experiments are conducted on the KITTI benchmark and results show that the proposed method can achieve state-of-the-art performance for 3D object detection.